



下記の記事と関連した話です。
fa-robot-watch.com
ロボットは干渉が大敵

プログラム次第で様々な動作ができる垂直多関節ロボットですが、大きな悩みの1つが干渉です。
ある姿勢をとろうとすると、周りの設備とぶつかる・隣のロボットとぶつかる・・・ロボットの適用検討のメカ分野の大部分を占めていると言っても過言ではありません。
干渉には2種類ある
干渉と一言で言っていますが、大きく2つに分けて考える必要があります。
例えば、ピック&プレースで、ワークを掴んで真後ろに置くというタスクを考えます。

目的姿勢での干渉
目的姿勢とは、その姿勢をとらないと目的の動作ができない姿勢です。*1

ピック&プレースで言うと、ワークを掴むときや置くときの姿勢です。
この目的姿勢で干渉が発生している場合、
ロボットの据え付け位置を変える、干渉相手の設備を移動する、7軸ロボットに変更する、など、抜本的な対策が必要です。
動作途中での干渉
目的姿勢から次の目的姿勢に移るまでの間で発生する干渉です。*2

この場合、ティーチングにより、干渉を回避することができる可能性があります。

ただし、余計な姿勢(ティーチング点)を入れるため、サイクルタイムが伸びるといった弊害があります。
上記のように、干渉はロボットを使用する上で頭の痛い問題ですが、その対策がされているロボットを紹介します。
7軸ロボット
干渉対策の代表的なものは、下の図のように、冗長軸(第7軸)を備えたロボットです。
(※本ブログで使用している用語や図示法についてはこちら:本ブログでのロボット模式図について - FA・ロボット業界の片隅から)
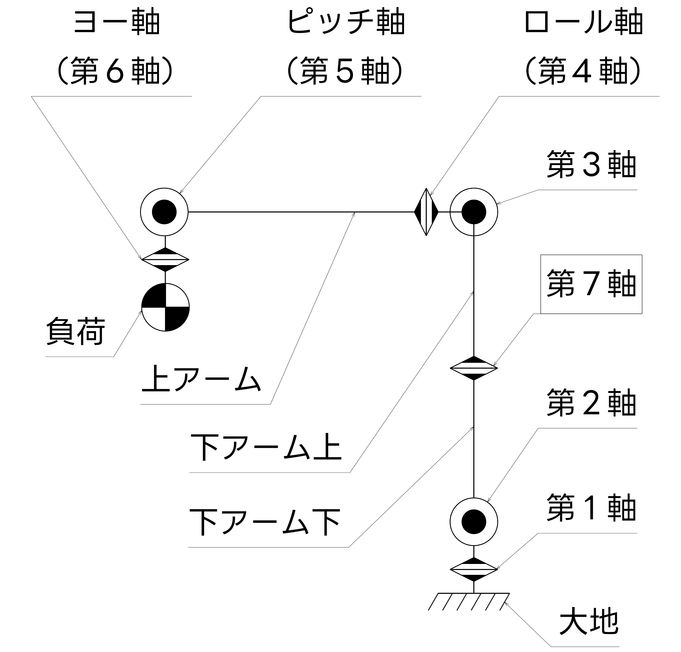
ロボットの機構によって目的姿勢での干渉を回避できるのは、この7軸ロボットだけです。
7軸ロボットについては、より詳しく他の記事でまとめたいと思います。
伸縮機構
JISに記載の分類で言うと、極筒座標ロボットになります。
最近の例では、ライフロボティクス社が開発したcoroがあります。
中央部分が回転し、手先部分がにゅっと伸びて目的のものを把持します。そのため、ロボットの第3軸付近(肘)が設備に干渉するリスクをぐっと下げることができます。
この機構、技術的にも商品価値としてもこのロボットのキモであり、いろいろ特許も出ていました。
https://www.j-platpat.inpit.go.jp/c1800/PU/WO-A-2017-094631/F0CD7B733B24BB22E12DC9DBAC867936497AC4BE43E983FDE4922841C56AB572/50/ja
(特許名称:直動伸縮機構)など。
ライフロボティクス社はファナックに買収されましたが、残念ながら現在coroは生産中止・回収となっています。
吉野家の協働ロボ導入、ファナックによるL社買収後どうなったのか | 日経Robotics(日経ロボティクス)
ファナック 代表取締役会長(当時はCEOも兼務)の稲葉善治氏は当時、本誌のインタビューで「COROはまだ試作の域を出ていないというのが実態。このままお客様にお使いいただく訳にはいかない」と、回収という判断に至った理由を述べている。
このように上記の記事にありますが、直動機構部の複雑さからなる信頼性の低さがネックとなったのではないかと推測しています。
(スライドのように後ろに飛び出さない)伸縮機構は、技術屋心をくすぐられる機構なので期待していたのですが、技術的ハードルは高かったようです。
横スイング可能アーム
安川やFANUCの協働ロボットなどでみられる形です。
ロボットが後ろ側に手先を持っていく場合、第1軸をぐるっと回すか、
ぐるっと上を通る必要があります。

が、どちらにしろスペースが必要で、他の設備と干渉する可能性が高いです。
そこで、上アームを下アームよりも短くすることで、上アームが下アームの横を通り抜けられるようにしたのがこのロボットです。

冒頭で紹介したような前から後ろへのピック&プレースで威力を発揮します。
折り畳み式アーム(エプソンNシリーズ)
第1軸と第2軸の間の距離を大きく取り、外見としてはアームが3本あるような形になっています。
発想としては前項の横スイングアームと共通しているのですが、さらに発展させています。
まとめ
干渉を回避して、狭いところでも素早く動作するために工夫されたロボットを紹介しました。
通常の形の6軸ロボットと比較して、広く普及しているとは言えませんが、うまくマッチする現場では非常な強みを発揮しますので、頭の片隅に置いておいてもいいのではないかと思います。