



今回は7軸ロボットについてのお話です。
7軸ロボット
7軸ロボット、このブログを読んでいるような方ならご存じと思います。
冗長自由度を持ち、障害物を回避して作業ができるというものです。
一般的な7軸ロボットについては、こちらのYAMAHAのページをご覧ください。https://www.yamaha-motor.co.jp/robot/lineup/ya/ya-7/
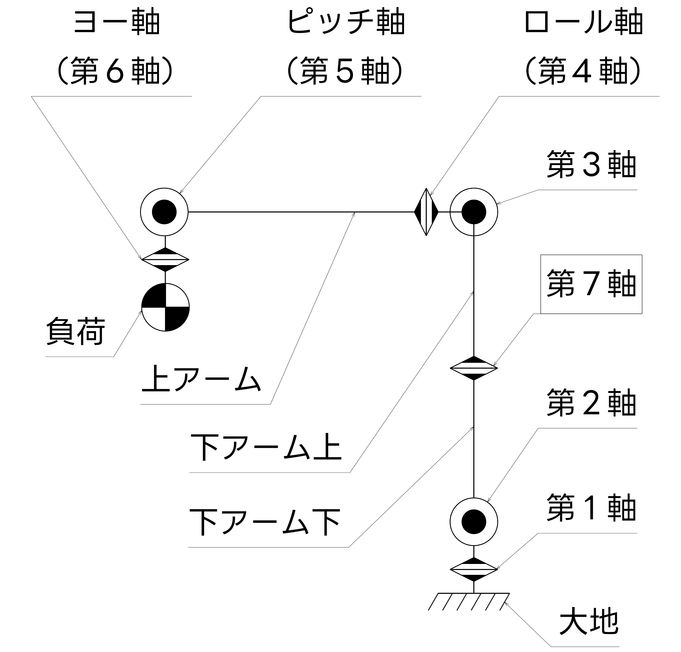
構造の模式図は下の図のようになります。
ですが、少し毛色の違った7軸ロボットがこちら。
安川のMOTOMAN SP100Bと
スポット溶接ロボット - MOTOMAN-SP100B - 仕様 - 産業用ロボット | 安川電機の製品・技術情報サイトより引用

FANUCのR-1000iA/120F-7Bです。
画像は多関節ロボット - R-1000iA/120F-7B - FANUC Europe Corporation/ファナック - 7 軸 / スポット溶接用 / ハンドリングより引用*1
公式資料: https://www.fanuc.co.jp/ja/product/catalog/pdf/robot/RR-1000iA(J)-07f.pdf

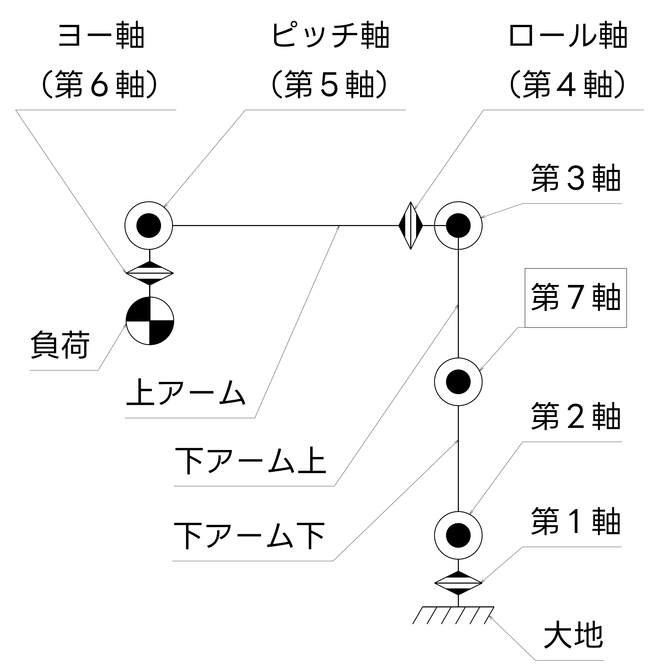
横から見て、第2軸と第3軸の間に、同じ向きで追加の軸がついています。
模式図だと下のようになります。
一般的な7軸ロボに比べ、姿勢を左右に変えることができず、あまり7軸目の意味がないように思えますが、なぜこのようなロボットがあるのでしょうか?
自動車のボディ溶接工程
その前に、この動画を見てみてください。
自動車の溶接工程(を模した展示デモ)です。
このように、自動車のボディ溶接工程は、ロボットがぎゅうぎゅうに配置されています。
これを実現するために、ちょっとずつ長さが違う多種類のロボットアームが必要となります。
短めのアームはボディの近くに置いて下の方を溶接、長いアームは遠くの方から腕を伸ばして上の方を溶接、というように使い分けます。
例えば、川崎重工のこのページ。
大型汎用ロボット(可搬質量300kg以下) | 川崎重工の産業用ロボット
あるいは、不二越のこのページ。
株式会社不二越 / 商品情報 / ロボット
長さ違いでたくさんのバリエーションがあります。*2
ですが、たくさんの種類のロボットがあるのは嫌ですね。設計も大変ですし、生産管理の面でも大変です。
また、使う側としても、ライン変更したときにまた別のアーム長のロボットが必要になったりと、面倒です。
そこで登場したのが、冒頭のロボットです。
下アーム伸縮により干渉を回避
第7軸の角度変更により、疑似的に下アームの長さを変更することができるという訳です。

一般的な7軸のロボットでは、干渉をかわすために左右を利用しますが、密集していると、左右に避けた場合隣のロボットにぶつかってしましいます。
そこで、平面的な動き(上下・前後)で干渉をかわすために、第2軸、第3軸と平行な軸を持った第7軸が有効というわけです。
通常の7軸ロボットは回り込んで障害物をかわす、というイメージですが、この7軸ロボットはしゃがみこんで障害物をかわす、というイメージです。
この形態のロボットを最初に見たとき、シンプルな解決策ですが、うまい方法だと思いました。
2022/12/21追記:安川電機から特許が出されていました(特許5975129):j-platpat
2023/6/16追記:実際に使われている工程の動画がありました。