



産業用ロボットの動作範囲(最大リーチ)の記載方法についてです。
下記の記事を書くために調べていた時に気が付きました。
fa-robot-watch.com
6自由度での動作範囲記載
6軸の垂直多関節ロボットの動作範囲を論じる場合、下記の不二越のロボット動作範囲図のように、第4,5,6軸の回転軸の交点のポイント(手首基準点)で記載するのが正統(JIS*1、ISO通り)です。
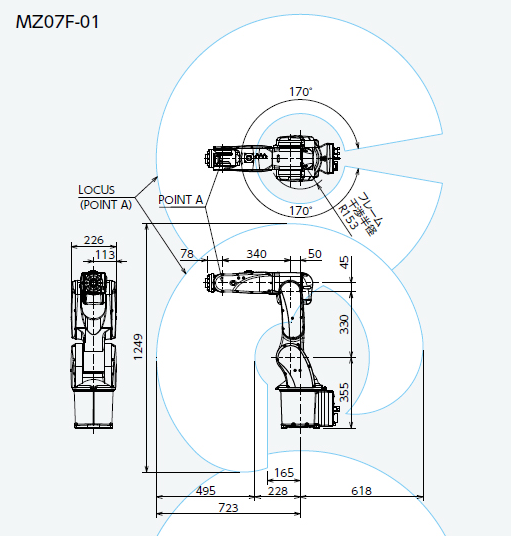
この点を基点として考えると、ロボット手首は任意の姿勢をとれるため、理にかなった表現方法と言えます。*2
このようにして表した動作範囲を、6自由度動作範囲と呼ぶ人もいます。
劣自由度での動作範囲記載
しかし、ツールを取り付けるフランジ面で最大リーチを記載していることがあります。
ロボットのある部位が到達できる範囲には違いないのですが、このリーチを満たすときには、ロボットの自由度が減っています。*3*4
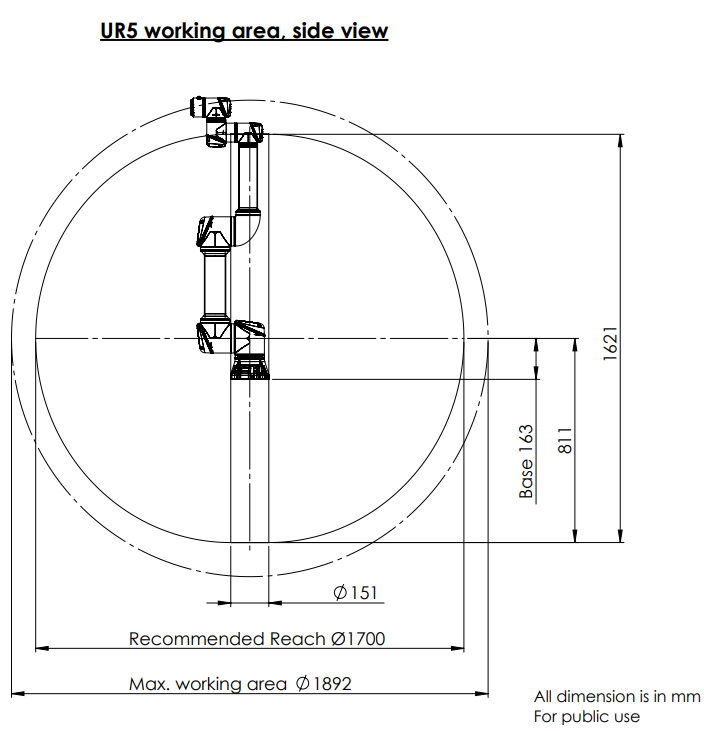
UR社のヘルプページの記載からの引用で、UR5eについての図です。
Recommended Reachとしてφ1700、Max working areaとして φ1892と記載してあります。
Recommended Reachは第4軸と第5軸の交点を基準にしており、6自由度の動作範囲です。*5
Max working areaはツールのフランジが到達可能な範囲ですが、劣自由度の動作範囲です。
ホームページやカタログのスペック表などで、この6自由度の動作範囲を記載していてくれたらいいのですが、劣自由度の動作範囲が記載されているメーカがあります。
ちなみに、UR社はこのφ1700(=R850)をスペックとしてホームページなどに記載していますので、ISO通りですので誤解なきよう。
URより後発のメーカで、劣自由度の動作範囲での記載をちらほら見かけます。
その影響を受けてか、従来ロボットメーカの中にも、協働ロボットの動作範囲の記載方法を変えてきている会社があります。
下記はFANUCのCRXについてのホームページの記載情報ですが、"(フランジ先端まで)"という断りがあり、従来の動作範囲の記載方法とは変えていることが分かります。
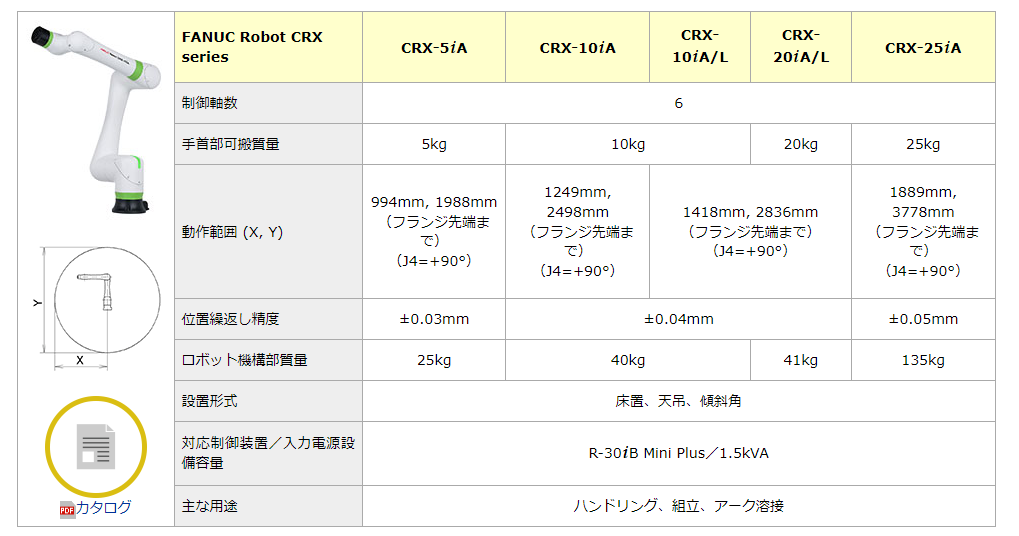
おそらくは、協働ロボット業界でフランジの到達点で動作範囲を記載することがデファクトとして広がっており、横並びで比較されたときに数字上で見劣りしないためにという判断だと思います。*6
ロボットの適用検討時にカタログの数字だけを見て決定するということはないので、あまり問題にはならないかと思いますが、なんとなくもやもやします。
もやる理由1
まずシンプルな理由としては、JISから逸脱しているからです。
もやる理由2
ロボットのフランジ面から作業点までの距離はハンドやツールによってある程度調節ができてしまうため*7、劣自由度となっているフランジ面の到達点を記載することは理にかなっていないと感じるからです。
もやる理由3
2つの記載方法の違いで100~200mmくらい数字が変わってくるため、少しでもカタログスペックを良くするためにサバ読みしているように思えるからです。
まとめ
協働ロボットが初めてのロボットという方はそれほど気にならないかと思いますが、長らく産業用ロボットに携わっていて、新たに協働ロボットを扱うという方は、1つ念頭に置いておいた方がいいかと思います。