



産業用ロボットのロボットアームを構成する機械要素についてまとめていきます。
本記事ではさらっと列挙していますので、より詳しくはリンク先記事や各メーカHPなどをご覧ください。
(イラスト)ロボット(6軸)|FA計画.comから画像使用
原動機
サーボモータ

現在主流の原動機です。
自社でモータ製品を保有しているFANUC、安川電機、三菱電機、Panasonicなどは自社製のものを、そうではない川崎重工や不二越などは購入品を使用していると思われます。
【ロボットも製造しているモータメーカ】
【モータ単体メーカ】
油圧シリンダ
産業用ロボット黎明期には油圧シリンダを使用していたロボットもありましたが、現在はあまり見られません。
- 油漏れによる周辺汚染のリスクがあること
- (ケーブルと比べて)パイプの取り回しに難がある
- モータと減速機の技術進歩により、油圧に頼らなくても必要なパワーが得られるようになったこと。
といった事情があると思われます。
ただ、昨今では油圧の利点が見直され、ボストンダイナミクスのビッグドッグなどで採用例が出てきています。
空気アクチュエータ
空気は圧縮性があるため、応答性や位置決めにおいて不利ですが、クッション性がある・漏れても安全という利点もあります。
最近、FESTOが空気圧アクチュエータで動く協働ロボットを発表しました。
The world's first pneumatic cobot | Festo USA
ブレーキ

電源が切れたときに保持する(ブレーキがかかる)「無励磁作動型」というタイプが一般的です。
予期せず電源供給が無くなった際などのアーム落下を防ぐ、重要な部品です。
基本的には、モータに内蔵されています。
メーカは三木プーリやシンフォニアテクノロジーが有名です。
三木プーリ株式会社 | MIKI PULLEY
クラッチ・ブレーキ | シンフォニアテクノロジー株式会社
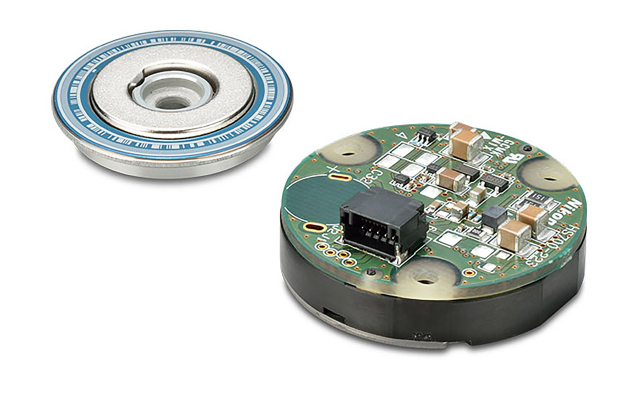
エンコーダ
原動機の回転角を検出します。
モータを製品として持つメーカーが内製(さらには外販)している場合もありますし、エンコーダに特化して製造販売しているメーカーもあります。
エンコーダに特化しているメーカとしては、私の知っている範囲ではニコン、レニショーなどが挙げられます。
レニショー:ものづくりの効率化とヘルスケアの向上
基本的には、モータに内蔵されています。
減速機

電動モータは速度が速くパワーが小さいため、低速・大出力に変換するために減速機が使用されます。
単体で減速比100以上を実現でき、バックラッシュも小さい、産業用ロボットの進歩を裏から支えている重要部品です。
ハーモニック・ドライブ・システムズ、ナブテスコ、住友重機械工業が有名です。
ハーモニック・ドライブ・システムズは波動減速機と呼ばれるタイプで小型~中型のものに強みがあり、ナブテスコと住友重機械はサイクロイド曲線を使った中型~大型の減速機に強みがあります。
また、減速機構だけではなく、関節の荷重を受けるためのクロスローラ―ベアリングやアンギュラ玉軸受が一体となっている製品もあります。
ギヤ・ベルト・プーリ―
モータと減速機の間で動力を伝達しつつ、うまく配置するため、または減速比を調整するために使用されます。
このようなギアは基本的には減速機とモータの間で使われます。
減速機の後で使用すると、ギヤのバックラッシが作用してロボットの動作制度に影響が出るためです。
ギヤ
ギヤは平歯車や傘歯車、珍しいところではハイポイドギアなどが使われています。
平歯車は回転軸をオフセットさせるために、傘歯車は回転軸の方向を変えるために使われます。
小原歯車の技術資料が分かりやすく、おすすめです。
歯車技術資料|小原歯車工業株式会社
ベルト・プーリー
ベルトは歯付きベルト(タイミングベルト)が使われます
三ツ星ベルトや椿本チエイン(つばきグループ)、ゲイツ・ユニッタなどが代表的なメーカーです。
構造部材(大きな部品)
鋳鉄・砂型によるアルミ鋳造
大型ロボットの構造部材は多くが砂型による鋳鉄で作られています。
- 中子を使い、中空の複雑な形状を製作できる
- 大きなものを製作できる(ダイカストと比較して)
といった利点があります。
ただ、
- 鋳放し部(機械加工をしない面)の寸法のばらつきが大きい(数mm単位)
といった欠点もあり、注意が必要です。
アルミダイカスト
小型ロボットは構造部材にアルミダイカストを用いることが多いです。
- 複雑な形状を製作できる(ただし中子は基本的には使わない)
- 鋳放し部でも表面がきれい
- 鋳放し部でも寸法精度がよく、クリアランスを攻めることができる
- 軽量(鉄と比較して)
といった利点があります。
中子を使わない場合、バケツのように片方が開口している形状である必要があります。
ダイカスト+砂中子という工法も可能ですが、工程が増えて量産性が落ちるため多く使われてはいません。
設計上どうしてもという場合に限って使っているようです。
あくまで外観からの推測ですが、安川電機の協働ロボット、FANCUのCRXなどは砂中子を使っていると思われます。*1
マグネシウムダイカスト
軽量化のために、構造部材にマグネシウムを使用しているロボットもあると聞いたことがあります。
(アルミの比重2.7に対し、マグネシウムは1.7)
ただ、マグネシウムは切子が発火するリスクがあり扱いづらい材料のため、広く使われてはいないようです。
繊維強化プラスチック(FRP)
一部、軽量化のためにFRPが使用されている例もあります。
下記の動画の4分20秒付近で、ひょいっとアーム部品を持ち上げていますが、CFRPだと思われます。*2
また、パラレルリンクロボット(閉リンクロボット)のアーム部にCFRPが使われているのはよく見ます。*3
加工や設計の難しさもあるため、部分的に使われるにとどまっているのでしょう。
溶接部品
あまり多くはないですが、溶接箇所がある構造部材を使っているロボットもあります。
比較的小さな部品
一般的な加工部品
シャフトやフランジなどは、通常の機械設備と同様にS50Cなどの炭素鋼、クロムモリブデン鋼(SCM材)などを切削加工して製作されます。
配線を固定するブラケットなどは板金加工で製作されます。
樹脂材料
小型ロボットのカバーや、協働ロボットのランプ部など、樹脂部品の採用は少しずつ増えているように感じます。
バランサー
重力に拮抗するように、モータの動力を補助するための要素です。
カウンターウエイト
多くの場合は、大きな鋳鉄の部品ですが、モータなどの要素部品がカウンターウエイト的な役割も果たすように配置されている場合もあります。
詳しくは過去記事をご覧ください。
fa-robot-watch.com
スプリングバランサー
ガス式と機械式があります。
下記の動画の7分9秒付近から、シリンダーにばねを収納して機械式のスプリングバランサーを組み立てている工程を見ることができます。
バランサ―の作用については過去記事がありますのでご覧ください。
fa-robot-watch.com
軸受
産業用ロボットで使用される軸受は、
- 高荷重・低速・・・リンクの回転部分や関節の荷重を受ける箇所など
- 軽荷重・高速・・・モータから減速機の間で使用される
の2種類の使われ方があります。
深溝玉軸受やテーパーコロ軸受などを適宜組み合わせて使用しています。
製造業に関わる人なら知っているかと思いますが、海外だとSKF、 ティムケン、トムソン、国内だとNSK(日本精工)、NTN、ジェイテクト、不二越などが有名です。
グリス
上記の減速機やギヤ、軸受部は当然潤滑が必要ですが、オイル潤滑はほとんどなく、グリスが使用されます。
減速機には専用のグリスが用意されており、軸受やギヤ部などには一般的なグリス(機械設備などで使用されるもの)が使用されます。
食品業界向けには、万一食品に混ざってしまっても害のない特殊グリスが使用されます。
配線
ケーブル
ロボットアーム内のケーブルは繰り返しねじりや曲げを受けるため、専用に設計された可動用ケーブルが使用されます。
大電や沖電線などが有名です。
配線については、過去記事がありますのでご覧ください。
fa-robot-watch.com
コネクタ類
ヒロセ電機、TE コネクティビティ、フエニックスコンタクト、日本圧着端子製造(JST)、ハーティング、molexなどなど、国内外たくさんのメーカがあります。
番外編)一体型アクチュエータ
過去記事で紹介したように、モータ(ブレーキ・エンコーダ)・減速機・制御基板などが一体となったアクチュエータユニットも製品として存在しています。
fa-robot-watch.com
ただ、ロボットメーカでこのようなアクチュエータを採用している事例は見たことがありません。
設計の自由度・コストという点でのデメリットがあり、差別化もしづらいため、産業用ロボットの設計ノウハウをすでに持っているメーカからするとうまみがないのだと思います。