



今回は、ロボットについている大きな「オモリ」の話です。
FANUCの大型ロボット
前回の記事でも登場しましたが、FANUCのm2000iAを再度見てみましょう。

別記事で平行リンク機構を紹介しました。
fasumi.hatenablog.com
今回は、後ろについている大きなオモリに着目します。
これは、カウンターウエイトと呼ばれるものです。
カウンターウエイトの原理
原理はシンプルです。
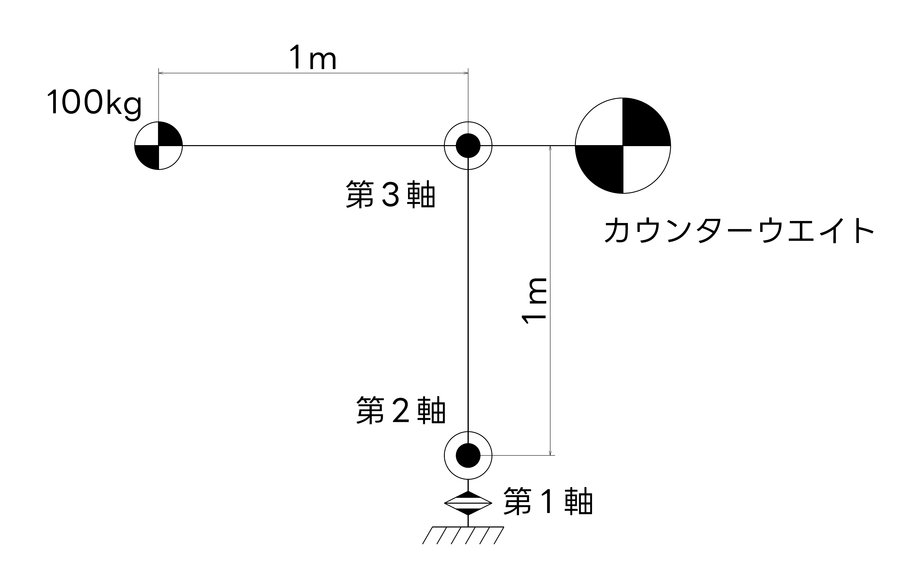
単軸のロボットに登場してもらいましょう。
(※本ブログで使用している用語や図示法についてはこちら:https://fasumi.hatenablog.com/entry/2022/11/14/152021)

この場合、軸にかかるトルクは、100kg×1m×10 = 1000Nm
(前回の記事同様、ロボット自体の重さは無視、重力加速度は10で近似しています)
このアンバランスを解消するために、天秤棒のように、反対側にも同じくらいの重さのウエイトを載せて、バランスを取ってみましょう。
下図ですと、搬送対象物とカウンターウエイトがちょうどバランスして、軸にかかるトルクはゼロです。
加速減速の時の慣性のみ、モータが負担することになります。

これがカウンターウエイトの基本的な考えです。
ただ、カウンターウエイト側があまり長いと邪魔なので、カウンターウエイト側のウデは短くして、代わりに重くするといった調整が行われます。
そうすると下図のようになります。
これも単純なてこの原理で、100kg×1m×10 = 500kg×0.5m×10 = 1000Nm となります。
(実際はワークの重量は一定ではない、かつ、ロボットの自重もあるので、0kgから最大の可搬重量までの全範囲で最も効率よくなるよう、カウンターウエイト重量を決めていると思います)

具体的にどう使うか
第3軸に使う
この構造をそのまま第3軸に使うと、こうなります。
ただ、単純に重りをつけたこの構造ですと第2軸への負荷が増大するので、あまり見ない使い方です。
あえて例を挙げるならKUKAのこのロボット。えらい大きいモータカバー?がついており、第3軸のカウンターウエイトとして機能しているのではないかと思います。
(第3軸の後方に3つ並んでついているモータを覆う黒い部品)
KUKA社 KR 600 FORTEC

ただし、モータを第3軸の後ろに置いているのはよく見ます。
どうしてもつけないといけない部品をカウンターウエイト的に配置して、少しでも力学的に有利にしているということだと思います。
平行リンクと組み合わせて第3軸に使う
ではどうするのがよいか?
前回説明した平行リンク機構と組み合わせて、このように配置するのがよく見る構造です。


リンク機構を使って第3軸を駆動しているので、第2軸の負荷も増大しません。非常に理にかなった構造です。
冒頭で紹介したFANUCのロボットをはじめ、各社の大型ロボットはこの構造をとっています。
第2軸に使う
第2軸に使う場合、模式図はこのようになります。

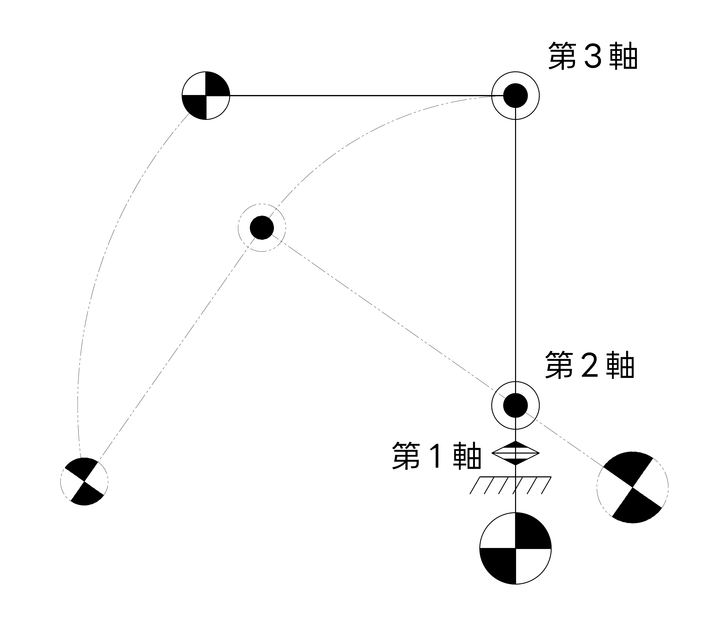
これも、実例としてはあまり見ません。
古い機種でいくつか知っていますが、現状ですと皆無と言ってもよいでしょう。
唯一、オークラ輸送機のロボットパレタイザA400という機種がこの構造かな?と思いますが、あまり情報がなく確信は持てていません。
ロボットパレタイザA400V | ロボットパレタイザA | 積付け設備 | 製品情報 | オークラ輸送機株式会社
第2軸の動力補助には、カウンターウエイトではなくバネ要素を用いての構造が多いです。
これについては、別の記事にまとめてありますのでご覧ください。
fa-robot-watch.com