



協働ロボットの要件の1つである「安全適合監視停止」について解説していきたいのですが、まずはロボットの「停止」について説明をしていきます。
主な出典は、ISO10218-1:2011(JIS B 8433-1:2015)、IEC60204-1:2016(JIS B 9960-1:2019)です。
この辺は知っているよという方は、そのまま本編に進んでいただいても大丈夫です。
fa-robot-watch.com
停止と一言で言っても、「どのように停止するか」「どのように停止を維持するか」「停止を解除する条件」というように分解して考えることができます。
停止カテゴリについて
まず、「どのように停止するか」「どのように停止を維持するか」を分類する停止カテゴリについて説明します。*1
どこかで聞いた方もいるかと思いますが、ロボットではという補足情報も付け加えていますので、お付き合いください。
カテゴリ0停止
- 停止の方法・・即時動力遮断
- 停止の維持・・動力が供給されないことで維持(ブレーキによる保持)
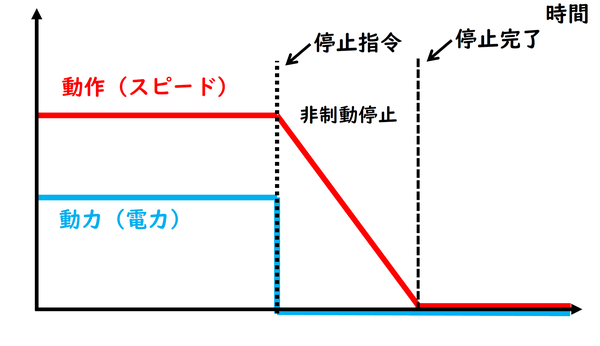
停止指令が入ると、即時に動力が遮断されて停止し、停止後も動力遮断状態が継続します。*2
即時電力を遮断すると、惰性で動き続けてどこかに衝突してしまうのでは?と思うかもしれません。
ロボットの場合、サーボモータは基本的にブレーキが付いています。*3
「無励磁作動」という種類で、通電しているときはブレーキがかからず、電源が落ちるとブレーキがかかる*4というものです。
これにより、電源が遮断されるとブレーキがかかり、短時間でロボットは動作を停止します。
停止後は、ブレーキでロボットの姿勢が保持されます。
カテゴリ1停止
- 停止の方法・・制動をかけて停止したのち、動力遮断
- 停止の維持・・動力が供給されないことで維持(ブレーキによる保持)
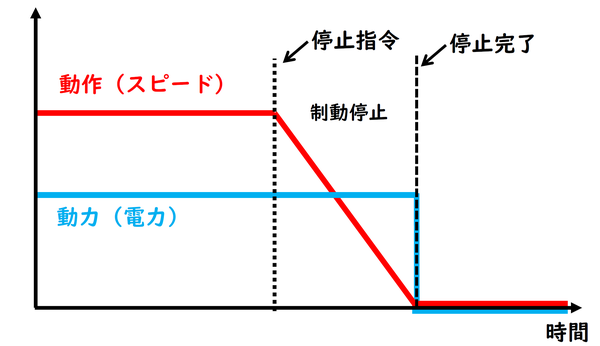
カテゴリ1停止は、サーボ制御によってロボットを急減速・停止させたのちに、電源を遮断します。
電源遮断後は、カテゴリ0と同様にブレーキで保持をします。
カテゴリ2停止
- 停止の方法・・制動をかけて停止
- 停止の維持・・サーボロックによる維持
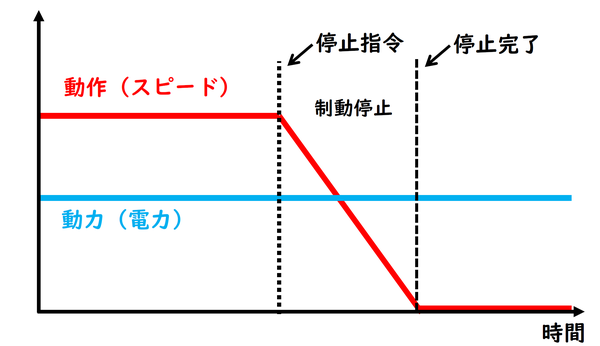
制動停止し、その後も通電し続けている停止です。
非常停止と保護停止
ここからはロボットの規格(ISO10218-1)の話になります。
ロボットは、非常停止と保護停止という2つの停止機能を備えることが規格で求められています*5
非常停止
非常停止は、人にロボットアームが衝突しそうな状況など、まさに非常事態で使用されます。*6
非常停止はカテゴリ0,カテゴリ1のどちらか、つまり電源遮断が必要です。
さらに、非常停止状態からの復帰(運転再開)には、人の手による操作が必須となります。危険が無いことを人が確認したうえでないと運転再開できない、という条件があるわけです。*7
保護停止
保護停止は、人を保護するため・リスク低減するための停止機能です。*8
これもカテゴリ0またはカテゴリ1でないといけませんが、カテゴリ2を使った停止機能を追加で備えていてもよいとされています。
保護停止状態からの復帰(運転再開)は、手動操作・PLCの論理回路などによる自動復旧のどちらでも可能です。
停止機能というのは安全に関わる機能ですので、故障率が一定以下・不具合検出機能があるなどの条件を満たしている必要があります。*9
さらに、停止カテゴリ2に関しては、
保護停止機能は、ロボット停止後に駆動力を除去しないが、停止状態の監視が必要となる。
とわざわざ記載があります。
大雑把な言い方になりますが、カテゴリ0,1の場合は「停止させる」ことを保証すればいいのですが、カテゴリ2停止の場合は「停止し続けている」ことも保証しないといけないためです。*10
まとめ
まとめると、下記の表のようになります。
| 名称 | 使用局面・目的 | 停止カテゴリ | 停止中の状態 | 運転再開条件 |
|---|---|---|---|---|
| 非常停止 | 非常時 | 0or1 | 電源遮断 | 手動によるリセット |
| 保護停止 | 使用者の保護・リスク低減 | 0or1 | 電源遮断 | 手動または自動 |
| 保護停止 | 使用者の保護・リスク低減 | 2 | 通電+ 停止状態の監視 |
手動または自動 |
| (停止) | 信号待ちなど | 2 | 通電 | 手動または自動 |
ロボットが停止していると一言でいっても、いろいろな状態があり、安全の観点からすると全くの別物です。
今回は全く協働ロボットの話に入らなかったですが、今回の内容を踏まえ、協働ロボットの「安全適合監視停止」についてまとめていきたいと思います。
続きはこちら。
fa-robot-watch.com
*1:IEC60204-1:2016; 9.2.2
*2:ちなみに、動力遮断はメカニカルな場合(クラッチで動力側と出力側を切り離してしまうなど)も含みますが、ロボットの場合はサーボモータで駆動していることがほとんどですので、動力遮断と電力遮断はイコールで考えていいと思います。
*3:ロボットアームの要素部品を説明する場合、モータ・減速機・エンコーダと挙げることが多いですが、個人的にはブレーキも非常に大切な要素だと思っています
*4:よくあるのは、ばね仕掛けでブレーキシューが押さえつけられており、電磁石で開放するタイプのものです
*5:ISO10218-1:2011;5.5.2, 5.5.3
*6:ISO10218-1:2011;5.5.2
*7:余談ですが、ロボットの場合カテゴリ0停止はほとんど使われておらず、カテゴリ1停止で停止します。カテゴリ0停止は各軸の減速度合いをコントロールできないため、ティーチの軌跡から外れてしまって設備と干渉する、停止のショックが大きすぎてロボットが破損する、もしくは把持しているワークが飛んでいくなど、弊害が大きいからです。
*8:ISO10218-1:2011;5.5.3
*9:詳細はISO10218-1:の5.4「安全関連制御システム性能」に記載のある通り、パフォーマンスレベル(PL)か安全度水準(Safety Integrity Level; SIL)を満たしている、もしくはそれと同等の性能を満たしていること
*10:余談ですが、通常の産業用ロボットを使ったシステムで安全柵の中に入る場合に、非常停止ボタンを押して入るのが習慣になっている人も多いかと思います(扉のインターロックなどが無い場合)。これは意味合いを考えると保護停止の範疇に入りますが、非常停止ボタンで兼用している運用も多いです。(ロボットが動いている状態からバチンと止めるわけではないので少し違うのですが)規格に厳しい人は「非常停止ボタンっていうのは普段からペシペシ押していいもんじゃないんだよ」と渋い顔をします