



昨日今日の話ではないのですが、協働ロボットのスペック上の最高速度がどんどん速くなっている事情と注意点について書きたいと思います。
- ロボットの最高速度について
- 協働ロボットの速度記載方法
- 協働ロボットで手先速度を記載する理由
- 以前までの協働運転時の最高速度
- 協働ロボットの最高速度インフレ
- 高い最高速度をスペックに記載できる理由
- 実用上は?
- 関連記事
ロボットの最高速度について
前置きになりますが、産業用ロボットでは、最高速度の表し方が2種類あります。
各関節の最高速度と手先の最高速度です。
- 各関節の最高速度:rad/secやdeg/sec
- 手先の最高速度:mm/sec
手先の最高速度はTCP速度と呼ばれることもありますが、ロボットメーカーのスペックの場合はツールが無い状態なので、ツール取り付けフランジの中心点の速度が使われます。
(TCP: Tool Center Point)
手先の最高速度は実際にワークをどれくらいで運べるのかという実用上の性能としてわかりやすいですが、各関節の速度はピンとこないですね。*1
協働ではない産業用ロボットの最高速度は、各関節の速度で表すことが多いです。
手先の最高速度の方が直感的に分かりやすいとは思うのですが、慣例だからなのでしょうか・・・
協働ロボットの速度記載方法
対して、協働ロボットは手先最高速度○○○mm/sと記載していることが多いです。
場合によっては、
- 通常運転時(人との接触の恐れがない場合)の手先最高速度:△△△mm/s
- 協働運転時の手先最高速度:○○○mm/s
と併記していることもあります。
なぜこのような記載方法になっているのでしょうか?
協働ロボットで手先速度を記載する理由
※ここからは、協働運転時(人と接触する恐れがある場合)での最高速度について話をしていきます。
一言で言うと、協働ロボットは人との衝突を考慮しているため、手先速度を記載していると考えられます。
ISO10218-1のT/S15066に人体の各部位に対して許容される力・圧力が規定されていて、外力検知の機能を搭載している協働ロボットは、その力を超えないように停止する必要があります。
手先の速度が速すぎると、規定の力で止まることができないため、「この速度の範囲ならば、規定の力以下しか人体に与えません」ということをメーカとして示しているわけです。
ロボットで最も速度が出るのは手先なので、人体に最もダメージを与えるのも手先となります。
手先速度は各関節の速度の合成で求められますが、ロボット姿勢も影響するため、各関節の速度だけでは安全速度域が表しづらいことになります。
そのため、手先速度で表しているのです。
この辺はメーカ側の内部事情となってしまうため推測ですが、ほぼ間違いないと思います。
以前までの協働運転時の最高速度
さて、協働運転時の手先最高速度ですが、もともと250mm/sを最高速度としているメーカーが多かったです。
現在では新しいスペックで上書きされているので出典を示すことが難しいのですが、安川電機のMotoman HCシリーズも登場時は250mm/sだったと記憶しています。
この250mm/sという速度がどこから来たかというと、ISO10218-1の2006年版(JIS B 8433-1:2007)に下記のような記載があります。
5.10協働運転要求事項
5.10.4 速度及び位置の監視
(前略)
ロボットは250mm/s以下の減速度で運転し、その位置を監視しなければならない。
(後略)
各社、ここに記載の250mm/sを採用していたと思われます。*2
なお、ISO10218-1の2011年版では、250mm/sという数値は本文からは削除されています。
ネット上でたまに「協働ロボットの動作速度は250mm/sが上限」という記載を見かけますが、規格改定前の古い情報に基づいての記載であり、現在は具体的な数字での速度制限はありません。
(修正ここまで)
この250mm/sという速度がどこから来たかというと、JIS B8433-1(ISO10218-1)内で低減制御速度として規定されている数字が元になっていると考えられます。
ティーチング時など、人とロボットがやむを得ず接近している状態でも、人が危険から退避できる速度とされています。
規格では、協働運転時にこの速度を守らないといけないとは書いていないため、250mm/sを守る必要はないのですが、協働ロボットを初めてリリースする際に、安全側に寄せて250mm/sを協働運転時の最高速度として採用したのではないかと思います。
(2023.10.05追記)
ISO10218-1:2006では、「5.10.4速度及び位置の監視」内に「ロボットは250mm/s以下の減速度(=低減速度)で運転し」と記載があるため、こちらの数字が参照された可能性もあります。
協働ロボットの最高速度インフレ
ですが、昨今はどんどん最高速度がインフレしています。
一例を示すと
- FANUCのCRXシリーズ:1000mm/s(協働運転時)*3
- 安川電機のMOTOMAN-HC10DTP:1000mm/s(協働運転時)*4
- Universal RobotのUR5e:1000mm/s(協働運転時の明記は無し)*5
- ABBのGoFa CRB 15000:2200mm/s(協働運転時の明記は無し)*6
などなど。
高い最高速度をスペックに記載できる理由
このように、どんどん最高速度を上げていって、安全上の問題はないのでしょうか?
どのような裏付けがあって、この速度で協働運転ができるとしているのでしょうか?
技術的側面
1つはセンサや制御方法の改良、アームの軽量化などによって、より高速でも安全に停止できるようになったという、技術的側面が考えられます。
ですが、250mm/sから1000mm/sになって、速度が4倍と言うことは、単純計算で運動エネルギーは16倍です。
マス(慣性)を下げるためにアーム軽量化を頑張っても、ワークの質量は変えられません。また、衝突というのはかなり短い時間で処理を終える必要があり、改良にも限界がありそうです。
つまり、技術的側面だけでこれほどのスピードアップを成し遂げたと考えるのは無理があります。
運用的側面
もう1つ、ロボットの運用条件という側面があります。
どういうことかと言うと、
- T/S15066では、各部位に対して許容される力が示されている
- 協働運転時、人のどこに衝突するかわからない状況では、示されている力のうち一番小さい力を守る必要がある
- だが、ロボットの設置状況などから、特定の人体部位だけの衝突する場合、その力だけクリアできればよい
- その場合には、手先速度1000mm/sを出しても大丈夫
という理屈です。
分かりづらいと思いますので、具体的に示します。
T/S15066からいくつかの数値を抜粋してみます。
下記は、過渡的接触(衝突)の人体各部位に対する最大許容力の抜粋です*7
- 腹:220N
- 前腕:320N
- 手及び指:280N
ロボットが人のどの部位に衝突するか分からない(どこにでも衝突するリスクがある)場合、一番小さい220Nを守る必要があり、それに応じた手先速度に調節する必要があります。
ですが、下記の図のように、安全柵に開口部があり、そこだけ人とロボットの作業空間が重なっているような場合はどうでしょうか。
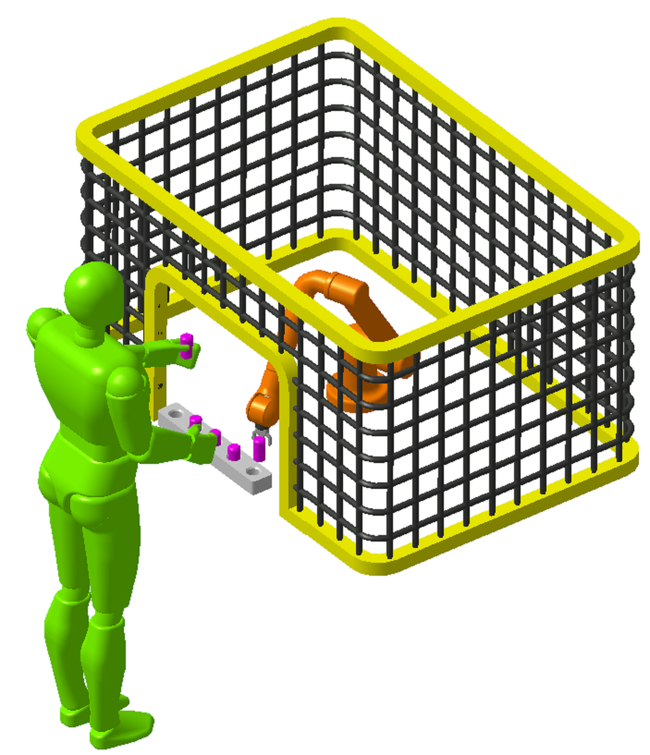
この場合「ロボットと衝突するのは前腕と手・指だけ」と限定して考えることができます。*8*9
そうすると、上記の許容値の280Nが許容力となり、それに応じてロボットの運転速度を速くできるというわけです。*10
いかがでしょうか。
協働ロボットの最高速度が(スペック上)速くなってきているからくりが見えてきたでしょうか?
つまり、ロボットのスペックシート上で協働運転時の最高手先速度1000mm/sと記載があっても、あらゆる部位に対して衝突時の許容力を守ることが保証されているわけではないということです。
言い換えるならば、
ある限定的な協働運転の条件でのみ1000mm/sを出せる、という機種でもスペック上「最高速度1000mm/s」と記載していると考えられます。
(事実、FANUC・安川では「最高速度はリスクアセスメントをして決定する必要があります」という但し書きをしています)
実用上は?
では実際のところどうなの?という話になると、ケースバイケースとしか言いようがありません。
結論がそれかよ!と突っ込みがあるかもしれませんが、メーカの但し書きの通り、最高速度はリスクアセスメントによって決めるしかないでしょう。
ロボットの作業内容や、ワークの形状・重量、設置方法、人が接近する頻度などなど・・・
また、1000mm/sは体感として結構速いです。近くで作業する作業者の恐怖心など、心理的側面も考慮する必要があるかと思います。
ここで注意したいのは、動作速度がどこまで出せるか、スペックシートだけをうのみにせずに実態に即して考える必要があるということです。
捕らぬ狸の皮算用で「これくらいのサイクルタイムで行けそうだ」と思うのは危険です。
実機での適用検討などが大切です(実際に1000mm/sで動いているところを見るだけでもだいぶ印象は変わるでしょう)
従来の産業用ロボットでも、思ったほどに動作速度が上がらないというのはよく聞くことですが、協働ロボットは考慮するファクターがさらに増えますので、より一層注意深い検討が必要です。
関連記事
衝突時の力の測定についての解説もありますので、併せてお読みください。
fa-robot-watch.com
fa-robot-watch.com
*1:色々な会社のスペックを見比べて、こっちの機種の方が速いのかな?と推測するくらいです
*2:厳密には、衝突検知機能を備えた協働ロボットは「本質的設計による動力及び力の制限」という用件を満たせばよいので、速度及び力の監視の数字を採用する理由はありません。各社手探りの中、安全側の判断をしたのではないかと推測できます
*3:https://www.fanuc.co.jp/ja/product/catalog/pdf/robot/RCRALL(J)-03.pdf
*4:ハンドリング(搬送・組立・検査)ロボット - 人協働ロボット MOTOMAN-HC10DTPシリーズ - 仕様 - 産業用ロボット | 安川電機の製品・技術情報サイト
*5:https://www.universal-robots.com/media/1807465/ur5e-rgb-fact-sheet-landscape-a4.pdf
*6:https://assets.ctfassets.net/gt89rl895hgs/1MBowsjHDvAEykEwKKBWwl/e2d1a0446a0b0ab046c5b8a510730121/GoFa_CRB15000-datasheet.pdf
*7:実際はもっとたくさん規定されていますが、簡単のために3つとしました
*8:挟まれなどの別の問題も考慮しないといけないのですが
*9:通常の稼働中です。メンテナンス時などは別途考慮が必要です
*10:なお、衝突時のダメージはこの許容値だけではなく、人体部位の質量やバネ定数といったパラメータも関連してくるのですが、今回は簡単のため省略します。また、手先と胴体では回避可能性も当然評価が変わってくるでしょうが、この点も省略しています。詳細を知りたい方はISO T/S15066やTS B0033を参照してください