



協働運転のシステム構築で、ロボットの接触検知機能*1を活用する場合、リスクアセスメントの一環として接触した時の人体へのダメージを評価する必要があります。
「どんな手順でどんな項目を実施するのだろう?」「まさか実際に人がぶつかってみるわけにもいかないし・・・」と疑問に思うかと思います。
今回は、ISO/TS15066(JISで言うと TS B 0033)に基づく、接触力測定についての大枠を紹介したいと思います。
分かりやすさ優先で書いていきますので、この記事を読んで興味を持った方は規格本文を確認してみてください。
前半・後半で分けますが、今回(前半)は接触形態の分類・人体をどうモデル化しているかなどを紹介します。
接触には2種類ある
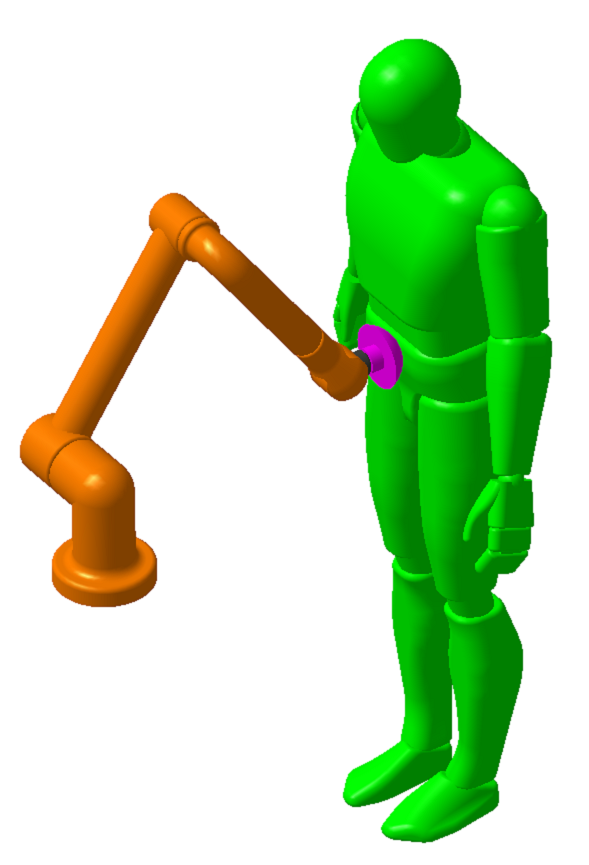
まず、人とロボットの接触の形態を2つに場合分けしています。
規格内では準静的接触(Quasi-static contact)と過渡的接触(Transient contact)という用語が使われていますが、
- 準静的接触⇒挟まれて人が逃げられない状況(捕捉された、とも言いますね)*2
- 過渡的接触⇒どーんとぶつかって人が飛ばされた状況。人が逃げるので、接触時間は短い。
というイメージになります。


ここでは、
- 準静的接触⇒挟まれ
- 過渡的接触⇒ぶつかり
と呼んでいきたいと思います。
力と圧力
同じ力でぶつかったとしても、ロボットが丸みを帯びているのか、角ばっているかでダメージは違いますね。
そこで、
- 力(単位:N)
- 圧力(単位:N/平方センチメートル*3)
の両方について評価する必要があります。
各人体部位の許容力・圧力
上記の4つの場合分けに加えて、人体部位のそれぞれについて、許容力・圧力が規定されています。
確かに、野球のデッドボールでも、二の腕にぶつかるのと頭にぶつかるのではヤバさが違いますよね。
ISO/TS15066(TS B 0033)では、額の中央、こめかみ、胸骨、胸襟、前腕筋、手のひら・・・などなど細かく29個の部位で定義してあります。
傾向としては、頭部周辺や臓器がある胴体は許容値が低めで、手足の末端にいくほど高めになります。
なお、頭部への接触は「いつでも防止されなければならない」と記載されています。詳しくは後述します。
各人体部位のばね定数
また、人の体のばね定数が定義されています。
人体のばね定数ってなんだ?と思うかと思いますが、
例えば、太もものような比較的やわらかい場所にぶつかるのと、脛のような硬いところにぶつかるのでは、当然ダメージが違うのは想像できると思います。
硬い部位は痛みが大きいですし、皮膚のすぐ下が骨ということなので骨折のリスクも高い部位になります。
その違いを表現するためのパラメータです。
各人体部位の有効質量
さらに、人体部位の有効質量と言うものが定義されています。
これは、ぶつかりの場合に関係があるのですが、ぶつかった後の受け流しやすさを表すためパラメータです。
例えば、道を歩いていてうっかり何かにぶつかってしまった場合、
腕がぶつかった場合は、腕が自然に振り子のように動いて、ダメージを受け流せます。

ですが、胴体ごとぶつかってしまった場合、ドシンッと全身で反動を受けることになります。
その場合、ダメージが大きいのは当然、胴体ごとぶつかった時です。
このようにぶつかる部位によってダメージが違うことを表現するパラメータが、人体部位の有効質量です。
(ちょっと表現が正確ではないのですが、分かりやすさ優先というでご了承ください)
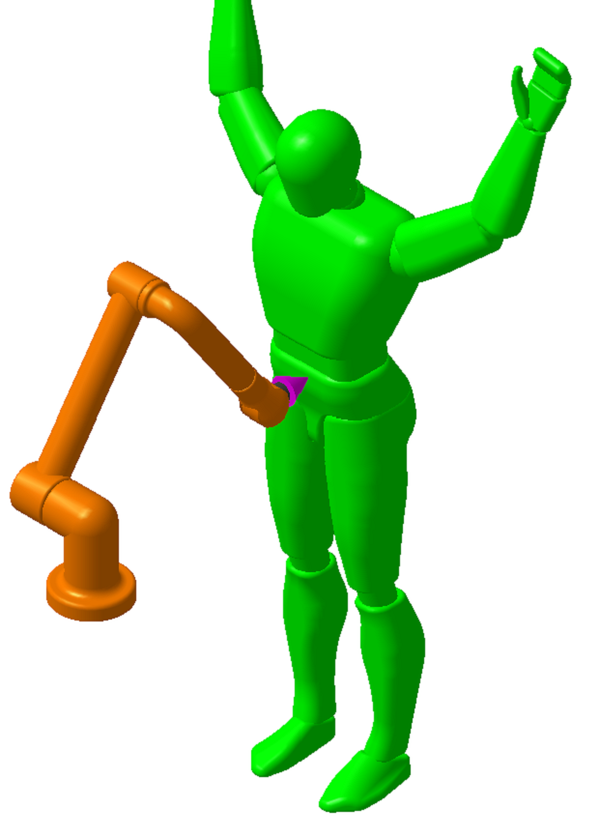
頭部への衝突は許容されていない
先ほども書きましたが、注意が必要なのが、衝突検知機能があっても頭部へのぶつかりは発生してはいけないということです。
頭部への衝突は、目や耳のけが(失明・失聴)や脳震盪のリスクなどがあることが理由だと考えられます。
したがって、ロボットのツール部が人の頭部の高さを超えないように規制するなど、別の対策が必要です。

例えば、上記の画像のように、ロボット手先がオレンジの半透明のゾーンだけを動くように規制するなどです。
ただし、このように規制しても、地面のものを拾おうとしてしゃがんだりした場合、ツールの高さに顔が来てしまうことも考えられますので、別途対策が必要です。
まとめ
ここまでの内容をまとめます。
接触の分類、人体の要件・パラメータについて紹介しました。
- ぶつかって逃げられない場合と逃げられる場合で分けて考えよう ⇒「挟まれ」と「ぶつかり」
- 同じ力でぶつかっても丸い面とエッジは違うよね ⇒力と圧力の両方からの評価
- ぶつかった場所で深刻度が違うよね ⇒部位ごとの許容力・圧力
- 人の体って硬いところも柔らかいところもあるよね ⇒人体のばね定数
- 受け流しやすい体の部位とそうではない部位があるよね ⇒人体の有効質量
全ての場合を評価しないといけないのか?
紹介した通り場合分けが多く、膨大な測定が必要になりそうです。
が、協働運転のシステム構築の際に、この全てを測定しないといけないわけではなく、実際は設備に応じて、ロボットと接触してしまうリスクのある部位のみで評価することになります。*4
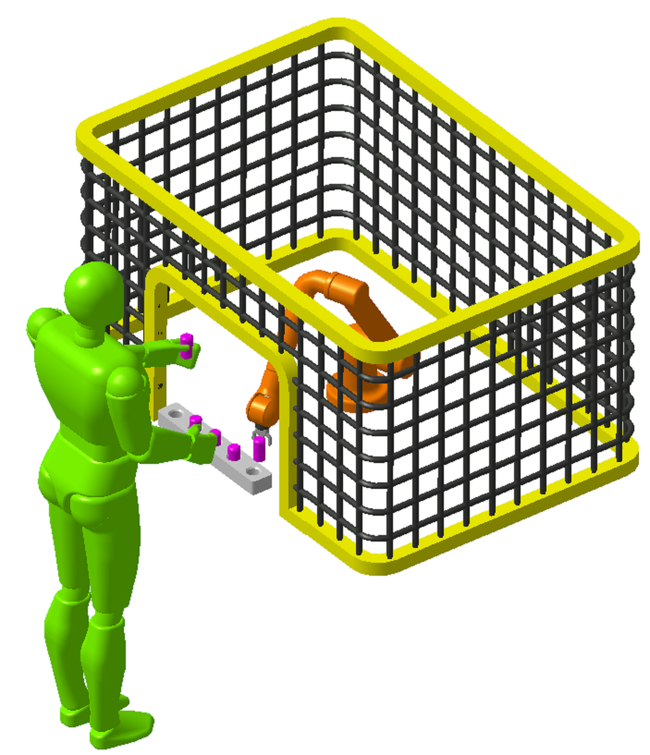
例えば、以前の記事で紹介したように、小窓があってロボットと手先だけが接触するリスクがある場合は、そのパターンだけを評価すればよいです。
挟まれとぶつかりについても、ロボットと周辺の設備の間の空間が十分に空いており、挟まれが起こらない場合は評価不要です。*5
もちろん実用上の制約はありますが、可能な限りロボットと人との接触を避けるように設計することで、リスクアセスメントの手間も減らせますし、安全性も高まります。
具体的な測定については、後半で紹介したいと思います。
fa-robot-watch.com