



協働運転要求事項の1つである、「速度及び間隔の監視」*1について解説していきます。
なお、分かりやすさ優先で書いていきますので、詳細は規格を参照してください。
規格での記載
ISO10218-1(JIS B8433-1)から引用します。
5.10.4 速度及び間隔の監視
ロボットは、決められた速度及びオペレータとの間隔を保たなければならない。この機能は、ロボットに組み込まれた複数の機能又は外部入力の組合せで達成してもよい。(以下略)
ちょっとピンとこないので、ISO/TS15066(TS B 0033)も見てみましょう
5.5.4 速度と間隔の監視
5.5.4.1 解説
この運転手法では、ロボットシステム及びオペレータは、協働作業空間内で同時に動いてもよい。リスク低減は、少なくともオペレータとロボット間の保護間隔の距離を常に維持することによって達成される。ロボット動作中に、ロボットシステムは、決して保護間隔の距離よりもオペレータに近づかない。間隔距離が保護間隔の距離よりも低い値まで低減したとき、ロボットシステムは停止する。オペレータがロボットシステムから離れると、この条項の要求事項に従い、ロボットシステムは保護間隔の距離を最低限維持しながら自動的に動作を再開できる。ロボットシステムが減速すると、保護間隔の距離はそれに見合って減少する。
つまり
- ロボットと人が同じ空間で作業していてもよい
- 保護間隔以下に人が接近したらロボットは停止しないといけない
- 距離が再び大きくなったら、ロボットは動作を再開してもよい
- ロボットが減速したは、保護間隔を小さくしてもよい
ということですね。
1つ目の「ロボットと人が同じ空間で作業していてもよい」は、「ロボットと人が同じ空間で作業している場合」というような前提条件の意味合いが強いでしょう。
ここの意味を取り違えると、誤解が生じてしまいます。
まずは間違った例から
ありがちな間違い(勘違い)を紹介します。下記のようなシステムです。
ロボットがある作業をしていて、人が近づいてきます。
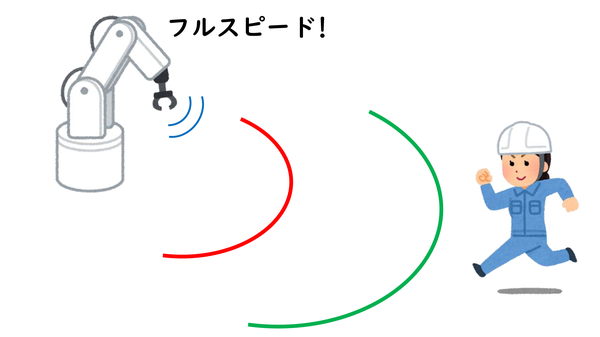
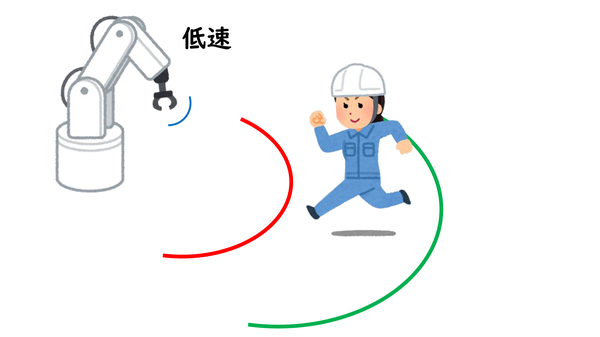
あるラインを越えたら、ロボットは減速!
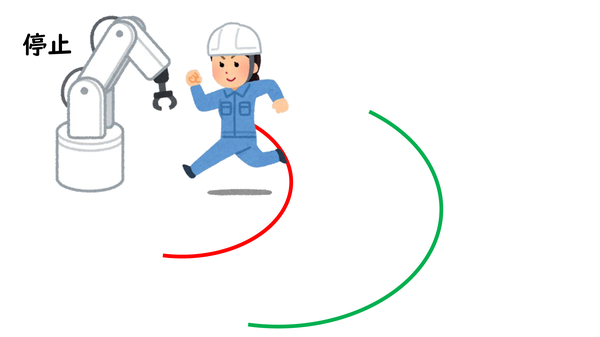
ある距離まで人が近づいたら、ロボットは停止!
その後、人が離れたら、再びロボット動作再開!
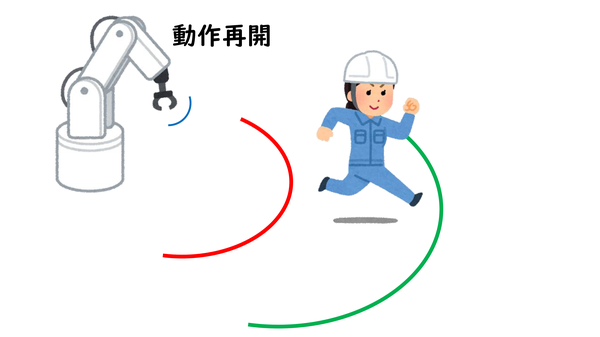
結構目にするシステムですね。
「ふむふむ、これが『速度及び間隔の監視』を活用した協働ロボットか~」と考えるかもしれませんが、違います。
規格内に「この運転手法では、ロボットシステム及びオペレータは、協働作業空間内で同時に動いてもよい」とありますが、この例ではロボットと人が協働作業空間内で同時に動いていないですね。
この例は、安全適合監視停止を活用したシステムといった方が適切です。*2
正解はこちら
正解の例を示します。
下記のように人とロボットが同じ空間で作業をしています。*3
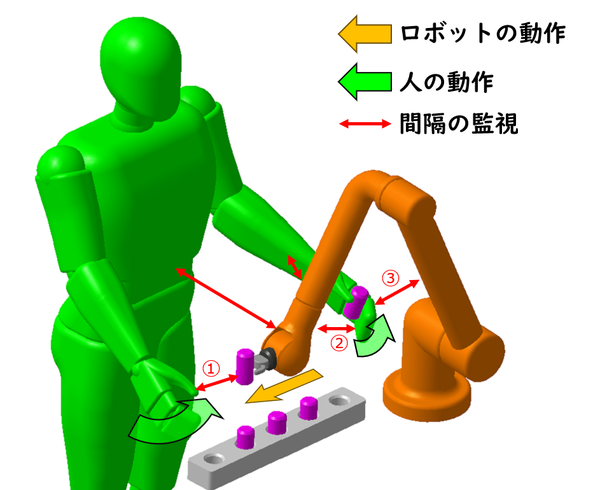
システムは、ロボットと人のあらゆる箇所の間隔と、間隔の変化(速度)を監視し、
その上で、ロボットと人の間の安全距離を計算し、その距離よりも近づいたらすぐに停止します。*4
例えば、人の右手とロボットの手先はお互いに近づいているので、保護間隔を短くする必要があります。(図中の①の矢印)
逆に、人の左手とロボットの手先はお互いに遠ざかっているので、保護間隔は長めにしてもよいですが(図中の②の矢印)、左手とロボットの下アームは逆に近づいているので、保護間隔を短くする必要があります。(図中の③の矢印)
過去記事で、人とロボットの協働作業を5レベルに分けている論文を紹介しましたが、その中のレベル4、レベル5に相当します。
fa-robot-watch.com
今後の展望
速度及び間隔の監視を使った協働システムを構築するには、人の運動を認識する必要があり、要求される技術はかなり高いです。
現在、自動車の自動運転が活発に開発が行われていて、一部実用化されていますが、自動運転ではある物体が人だと認識する・人がどの方向にどんな速度で動いているか認識することが求められます。
このシステムではさらに一歩踏み込んで、人の腕・手がどう動いているかといったところまで認識する必要があります。
今現在、このシステムが実用で動いている例は、私の見聞きする限りではありません。
安全マージンをたっぷり取れば実現できるかもしれませんが、そうすると、最初に紹介した誤った例とあまり大差ないシステムになってしまいます。
今後、技術の進歩に伴って実用化されるかもしれませんが、5年、10年単位の時間が必要ではないかと予想しています。
*1:JIS B8433-1だと"速度及び間隔"の監視、TS B 0033では"速度と間隔の監視"となっていますが、この記事では"速度及び間隔の監視"とします
*2:これを「速度及び間隔の監視」と呼ぶことが絶対的に間違いだとも言い切れないですが、規格の意図からするとやはり違うと思います
*3:人体モデルはhttps://grabcad.com/library/human-body-model-1を使用しています
*4:図では赤矢印をかなり間引いて描いています