



前記事の①は、長い前置きになってしまいました。
いよいよ本題の「安全適合の監視停止」について説明していきます。
fa-robot-watch.com
規格上は
規格でどう書かれているか、見てみましょう。
JIS B 8433-1:2015(ISO10218-1:2011)から引用します。(注釈・下線は私が付けました)
5.10.2 安全適合監視停止
人間が協働作業空間内に存在するときは、ロボットは停止しなければならない。停止機能は、5.4*1及び5.5.3*2に適合しなければならない。
人間が協働作業空間から離れると、ロボットは自動運転に復帰してもよい。
又は、ロボットはJIS B 9960-1*3に従った停止カテゴリ2としてもよい。この停止は、一旦停止したら5.4で規定する安全関連制御システムによって監視しなければならない。
下線部の2つの文章、
- 人間が協働作業空間内に存在するときは、ロボットは停止しなければならない。
- 人間が協働作業空間から離れると、ロボットは自動運転に復帰してもよい。
は非常に分かりやすいですね。
ロボットに人が近づいたら停止し、人が離れたら運転再開する、ということです。
下線をしなかった箇所、
- 停止機能は、5.4及び5.5.3に適合しなければならない。
- 又は、ロボットはJIS B 9960-1*4に従った停止カテゴリ2としてもよい。この停止は、一旦停止したら5.4で規定する安全関連制御システムによって監視しなければならない。
は、一見とっつきづらい文章ですが、前回の記事を読んでいただいた方はピンとくるのではないでしょうか。
保護停止のカテゴリ0もしくは1,または、監視されたカテゴリ2停止、ということで、停止状態が保証されていることが必要、ということです。*5
世間の協働ロボットはカテゴリ2停止が多い
では実際の製品ではどうなっているかというと、世の中の協働ロボットは監視されたカテゴリ2停止が多いようです。
例えば下記のリンクは、ユニバーサルロボット社のUR eシリーズの安全機能の説明ですが、Safeguard stop(Protective stop)はカテゴリ2停止であると記載があります。
https://www.universal-robots.com/media/1804320/e-series-functional-safety.pdf
憶測ですが、その理由として
- 停止時の軌跡が不安定になる(カテゴリ0停止)*6
- 電源遮断してしまうと、復旧時に若干時間を要する(カテゴリ0、1停止)
という欠点があるためだと考えられます。
さらに、協働ロボットの場合はデフォルトで安全適合の監視システムを備えていることが多いため、監視停止をするハードルがそれほど高くないことも1つの要因だと思います。*7
実際のシステムはどうなるか
単純な例
実際の運用で、最も単純な例は下記のような形です。
人が近づいてきて・・・
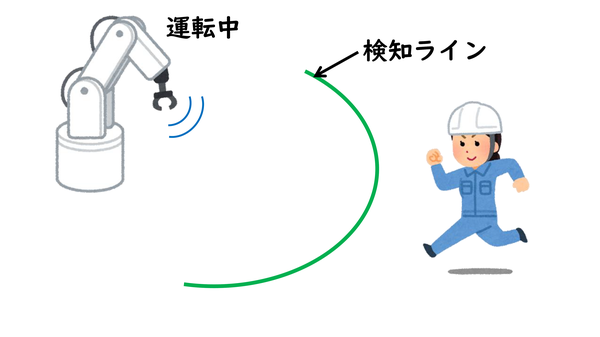
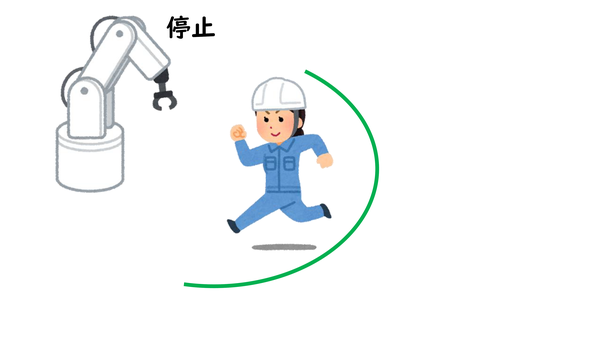
人が検知ラインを超えるとロボットは停止・・
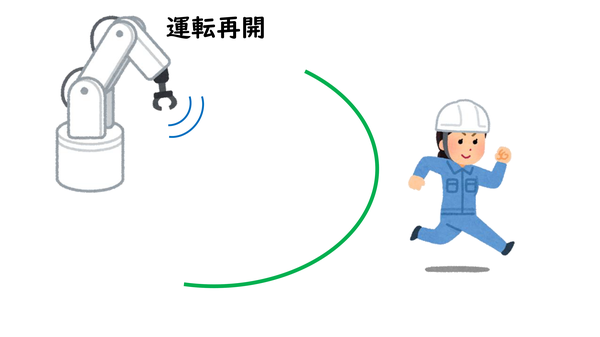
人が再び検知ラインの外に出ると、ロボットは運転再開
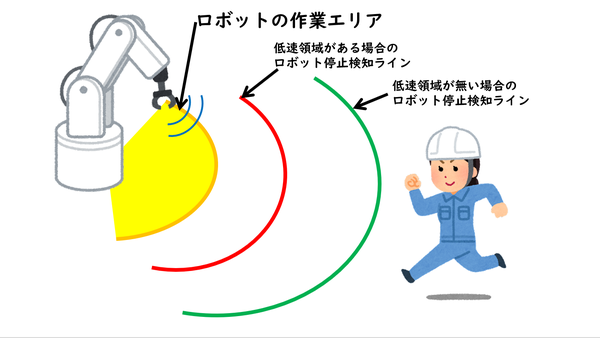
なお、人を検知するラインは、ロボットの作業エリアぴったりではありません。
検知ラインとロボットの作業エリアの間に、マージンが必要です*8
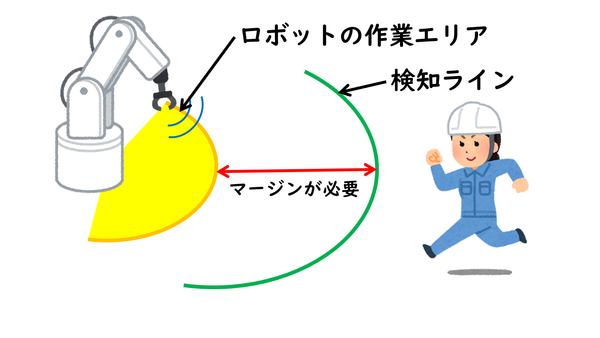
このマージンがないと、ロボットが完全停止する前に、人がロボット(=危険源)に到達してしまうためです。*9
中間領域を設ける例
運転・停止のON/OFFではなく、中間でロボットが低速になる空間を設ける例もありますね。
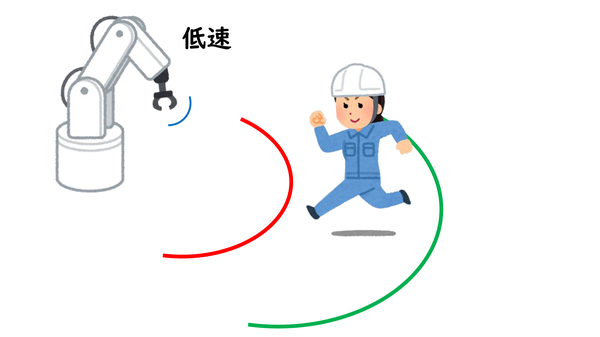
人が近づいてきて・・・
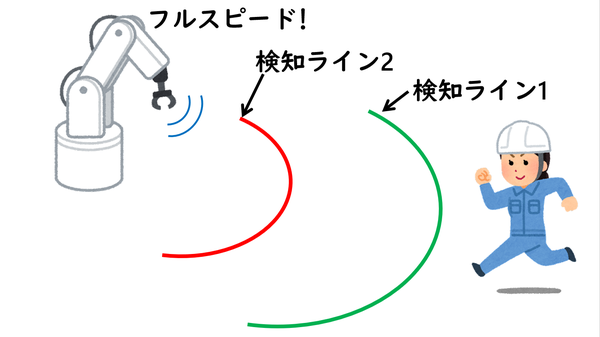
1つ目の検知ラインでロボットは低速に・・・
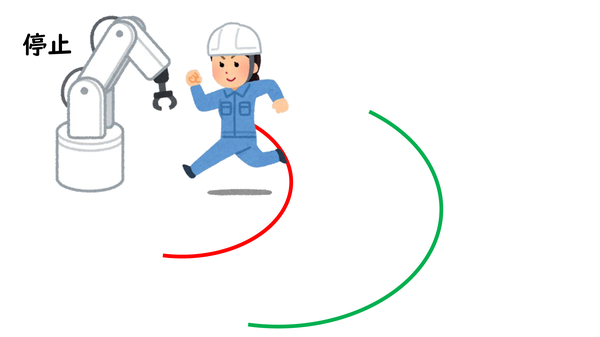
2つ目の検知ラインでロボットは停止!
低速運転しているロボットは停止完了までの時間が短いため、結果としてマージンの距離を短くすることができ、人がより近くにいても動き続けることができます。
人とロボットの協働作業5分類では
過去記事で「人とロボットの協働作業5分類」を紹介しました。
fa-robot-watch.com
この分類を用いるならば、「2.Coexistence -共存」または「3. Synchronized(Sequential Collaboration) - 交互」の協働運転をするシステムと言えると思います。
まとめ
いかがだったでしょうか。
「ロボットに人が近づいたら停止し、人が離れたら運転再開する」というだけの単純な話ですが、背後にいろいろと小難しい話が隠れているということを実感していただけたと思います。
「停止する」というのは、ある意味で一番確実な安全方策だと思いますが、それだけにおろそかに扱えないものだと感じます。
ロボットを使ったシステム構築の参考になれば幸いです。