



協働ロボットは柵が要らないロボット、となんとなく思っている方も多いと思います。
では人とロボットの「協働」とはいったいどんな状態を意味するのでしょうか?
その疑問に答えるような論文がありましたので、紹介したいと思います。
- ベースにした論文について
- 言葉の定義
- 1.Cell - 隔離
- 2.Coexistence -共存
- 3. Synchronized(Sequential Collaboration) - 交互
- 4. Cooperation - 同時
- 5. Collaboration(Responsive Collaboration) - 連携
- 注意点
- まとめ
- 参考資料など
ベースにした論文について
ドイツのFraunhofer IAO*1で、ヒトとロボットの協働について5つに分類・定義しています。
下記からダウンロードできるのですが、私なりに抜粋・要約して訳していきたいと思います。*2
https://www.researchgate.net/publication/327744724_Lightweight_robots_in_manual_assembly_-_best_to_start_simply_Examining_companies'_initial_experiences_with_lightweight_robots
各分類の英語名については、参考文献に基づきます。日本語は筆者訳です。*3
言葉の定義
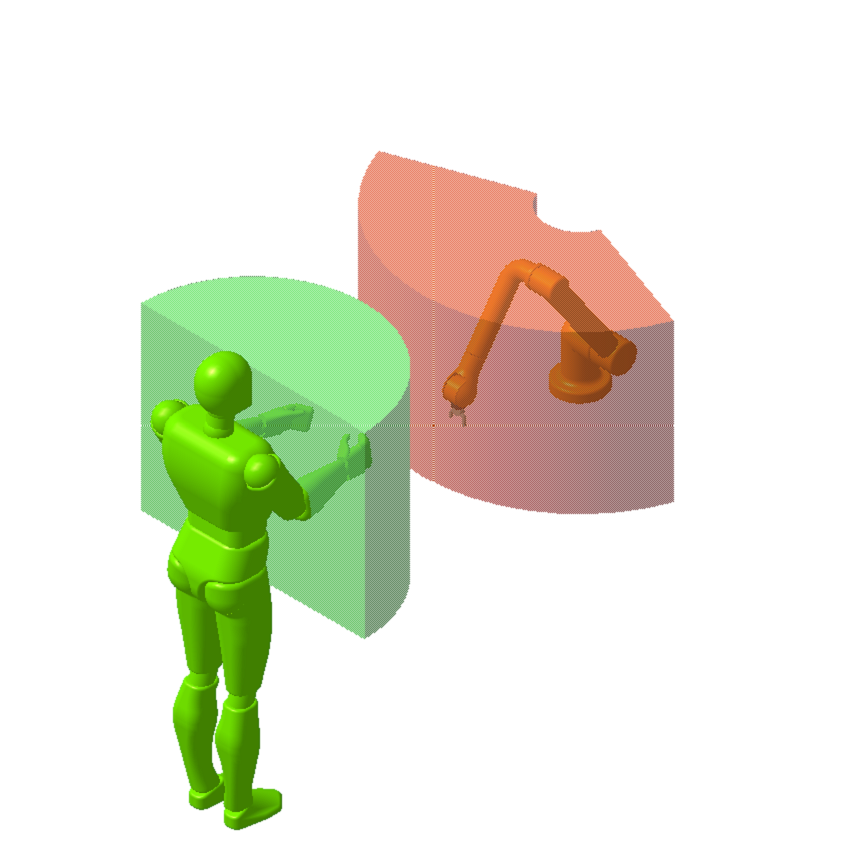
Workspace - 作業空間
ヒト・ロボットが作業をするときに使用している空間です。
ロボットの作業空間といった場合、スペック上の最大の動作範囲ではなく、ソフトウエアによって制限されている場合*4はその範囲となります。
ヒトの作業空間についても、ヒトの最大限の動作範囲ではなく、作業時に必要とする空間のことです。*5
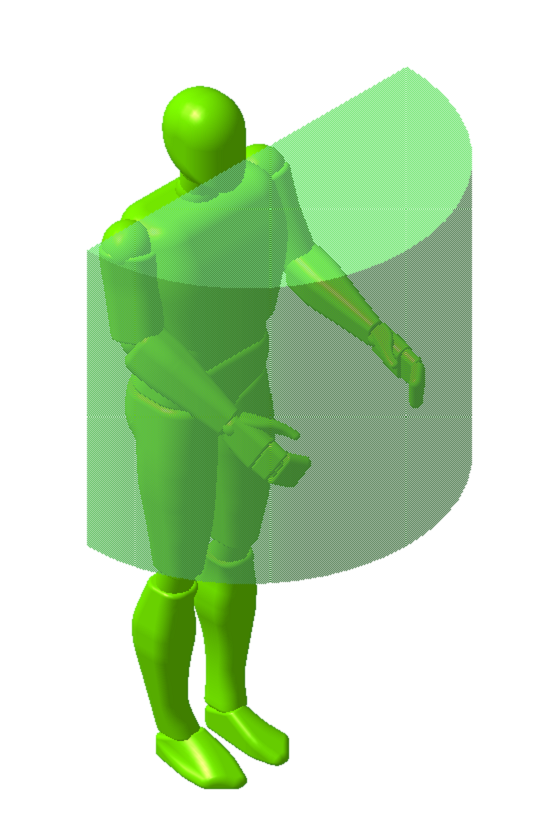
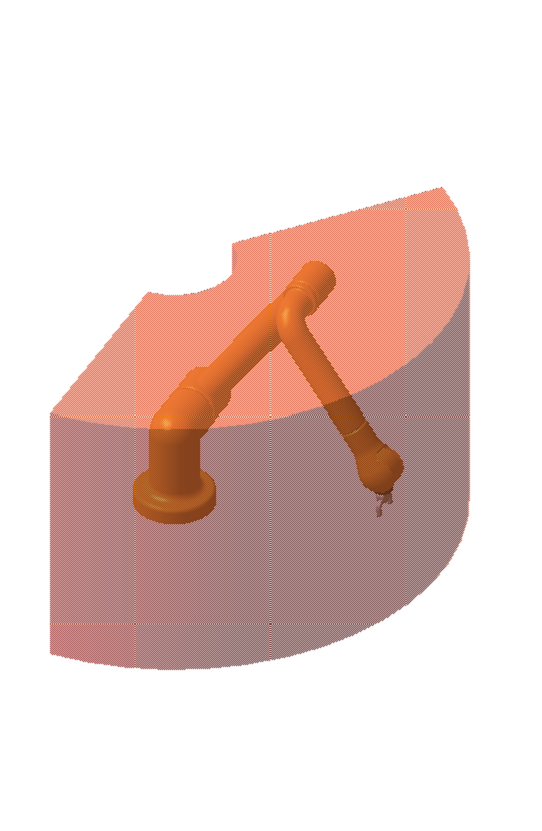
緑色がヒトの作業空間、オレンジ色がロボットの作業空間です。
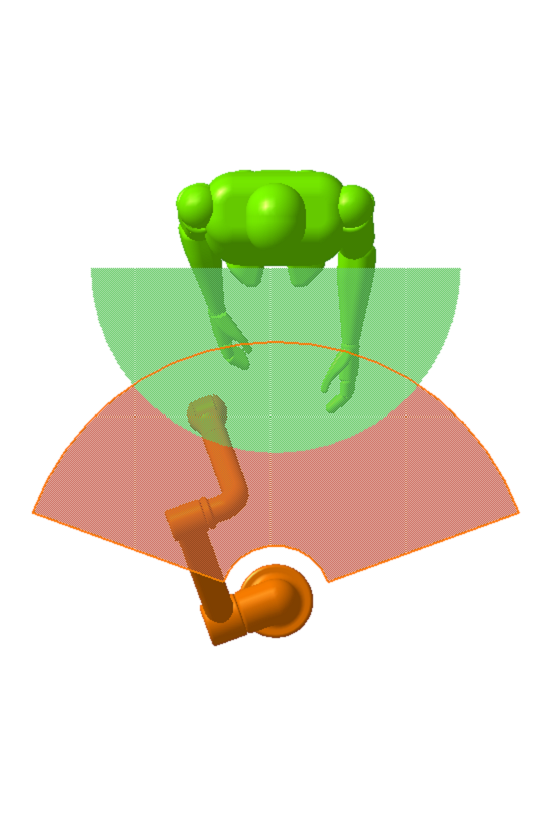
Shared Workspace (Common Workspace) - 共有作業空間
ヒト・ロボットの作業空間が重なっているとき、その重なっている空間を共有作業空間と呼びます。
それでは、5つの分類について紹介していきます。
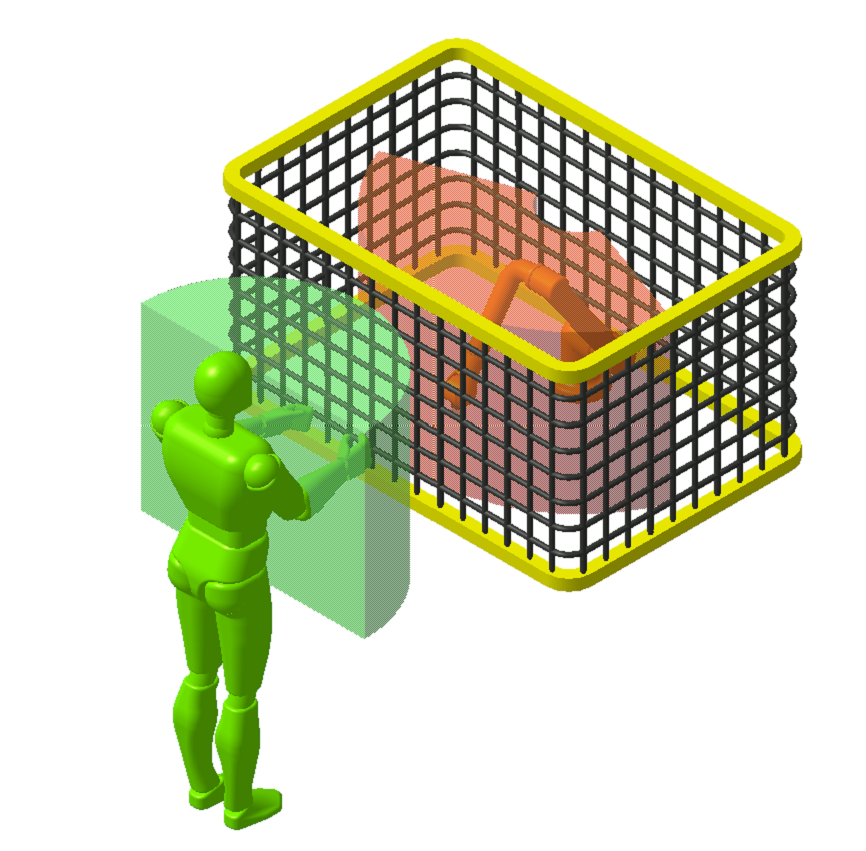
1.Cell - 隔離
ヒトとロボットが柵で分離されており、お互いの作業空間が分離されている状態です。
ヒトとロボットでワークの受け渡しが必要な場合はベルトコンベヤなどを介して行い、柵の開口部にはライトカーテンなどが設置されています。
現代における「産業用ロボット」の運用形態のほとんどがこれに当たります。
最も低いレベルでの協働作業、と書かれていますが、感覚的には協働ではないですね。協働作業レベル0といったところでしょうか。
例
ロボットが柵内で溶接をしている、柵内でパレタイズをしている、柵内で組み立てをしている・・・などなどいくらでも思いつきます。
必要な機能や検討事項
- 扉のインターロックによる動力遮断
- 機械安全に適合したヒトとロボットの分離(十分な高さがあり固定された柵など)
なお、「このレベルではこの機能が必要」と明示されているわけではありません。あくまで筆者が考える一例です。詳しくは後述。
メリット
ロボットは柵内にいて、運転中はヒトは近づきませんので、ロボットの性能をフルに発揮できます。最大限のスピードで動いても、重いものを搬送していても安全を確保できます。柵という物理的なバリヤがあるので、安全性が最も確実に確保できる運用形態と言えます。
また、柵内にヒトがいない=動く、ヒトがいる可能性がある=止める、というシンプルな考え方なので、それほど高度な技術要素を必要としないというのも、メリットの1つです。
デメリット
逆に、デメリットとしては柵のために広い設置面積が必要となります。
また、柵内にロボットがあるので、トラブル対応の時にはいったんロボットを止めて柵のの扉を開けて、というステップが必要です。また、柵内に複数のロボットがいる場合、どれか1つがメンテの対象だとしても全ロボットを停止する必要がありますね。
2.Coexistence -共存
概要
ヒトとロボットは柵などで分離されていな状態ですが、ロボットとヒトの作業空間は重なっておらず、各々が各々のタスクをしています。
もしもヒトがロボットの作業空間に入りそうになった場合、ロボットは停止します。
なお、必ずしも接触検知・停止機能を備えているロボットである必要はありません。
もちろん、接触検知があった方がいいのはもちろんですが、考え方としてはヒトとロボットの距離を監視し、ヒトがロボットの作業空間に入る前に停止するという考え方です。
これが協働ロボット?という感覚を持たれる方も多いかもしれませんが、ISO10218-1の「安全適合の監視停止」に合致しています。
例
ABBのSWIFTIは、協働ロボットとして販売していますが、外力を検知する機構は備えていません。
ロボットの制御装置がPL d Cat3の速度監視・停止監視を備えており、それに安全センサを接続することで、安全を確保しています。
ABBの新しいSWIFTI™協働ロボットは、一般的な産業用ロボット水準の速度での協働作業を実現します
必要な機能や検討事項
- エリアセンサーを利用した人とロボットの距離の監視
- ヒトとロボットの距離に応じて速度を調整、ヒトがすぐ近くに来たら停止(停止監視)
- ヒトの作業空間とロボットの作業空間の近さ、ロボット停止までの時間を考慮した上で速度を決定
メリット
柵によるデッドスペースを削減しつつ、ある程度、高速・高可搬重量のロボットを使用できます(できる可能性があります)*6
柵がないため、メンテナンスも素早くできますし、複数のロボットが並んでいる場合でも、最小限の停止ですみます。
デメリット
ヒトが近づくたびに作業が中断されるので、作業スピードが犠牲になります(用もないのにセンサー検知エリアに入り込んだりする人がいるかも・・・)
また、ヒトが近づいたら止まるとは言え、高温のワーク・重量物といった、ロボットの運動エネルギー以外の危険源がある場合、この形態をとるのは難しいかもしれません。
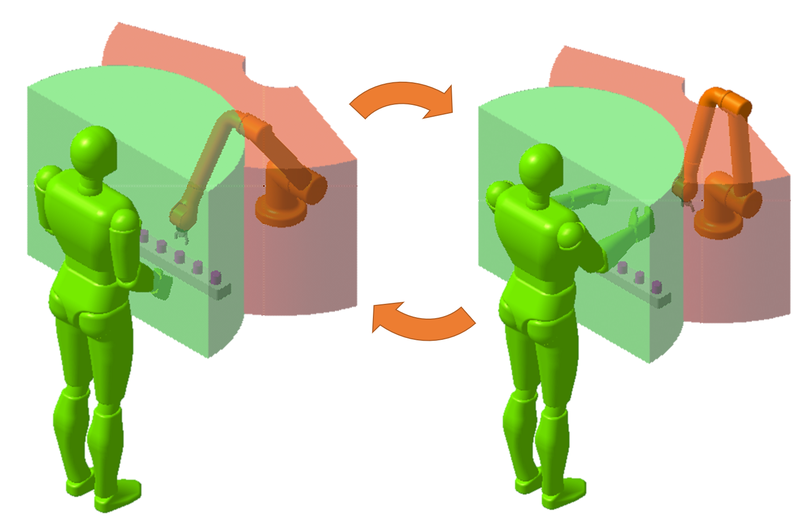
3. Synchronized(Sequential Collaboration) - 交互
概要
ヒトとロボットの作業空間は重なっていますが、共同作業空間では、ヒトかロボットのどちらか片方しか作業していないという状態です。
必要な機能や検討事項
- ヒトの手先がどこにあるか判定
- ヒトの作業状態に応じた速度監視・停止監視
- 適切なタイミングでロボットが作業をする作業計画
- 万一の接触の際に停止できるよう、動力と力の制限*7
例
ロボットがワークを運んできて、パーツパレットに置く作業をしつつ、作業者はパーツパレットに置かれたパーツを検品している、といった状況が考えられます。
ヒトが手を伸ばしてパーツをとるときは、ロボットは退避または停止していて、ヒトの手が共有作業空間からいなくなったスキに、新たなパーツを持ってきます。
メリット
ヒトとロボットが、より近くで連携して作業ができるようになるため、ワークの受け渡しがスムーズになるなど、作業の効率化につながります。
デメリット
「共存」と比べると、ヒトとロボットが近くにいるので、さらに動作速度を遅くする必要があります。
また、ヒトの作業時間とロボットの作業時間に偏りがある場合は、どちらかのムダ時間が多くなるかもしれません。
ヒトへの危害を防ぐために、より高度な制御が必要になります(ヒトの位置だけではなく、姿勢なども検知する必要があるかもしれません)
4. Cooperation - 同時
概要
ヒトとロボットの作業空間が重なっていて、さらに、ヒトとロボットが同時に作業している状態です。
ただし、ヒトとロボットは同じ部材に対しては、同時に作業はしていません。
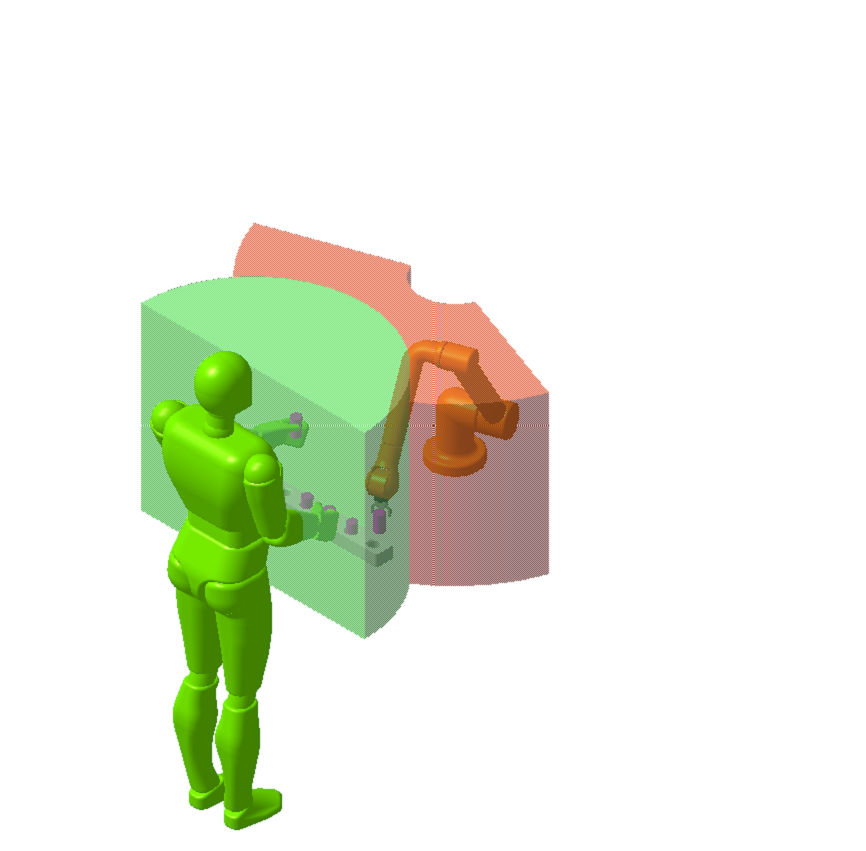
例
例えば、おもちゃの組み立てで、シール貼りと部品の組付けという2つの作業があるとして、ロボットがシール貼りを担当し、ヒトが部品の組付けをしている、というような状況です。
ロボットは、ヒトが組付けを終えたおもちゃに対してどんどんとシール貼りをしていきます。
シール貼りは定型作業で、部品の組付けは多品種対応、というような場合はこのような分担が効果的かもしれません。
必要な機能や検討事項
- 作業をしていいおもちゃの判別
- ヒトの動作の理解と監視・必要に応じた停止
- 万一の接触の際に停止できるよう、動力と力の制限*8
メリット
ロボットは休むことなく作業を継続できるので、稼働の効率が高くなります。
デメリット
ヒトの作業とバッティングしないように、ヒトの作業状態まで理解しての動作が必要(場合によってはロボットビジョンが必要かも)で、高度な制御やシステム構成、ティーチングといったことが必要になります。
また、ヒトへの危害を防ぐために、より綿密なリスクアセスメントと高度が制御が必要になります。
5. Collaboration(Responsive Collaboration) - 連携
状態
共有作業空間で、ヒトとロボットが同時に、同じ部材に対して作業している状態です。
この5分類の中では、最もハイレベルな協働作業です。
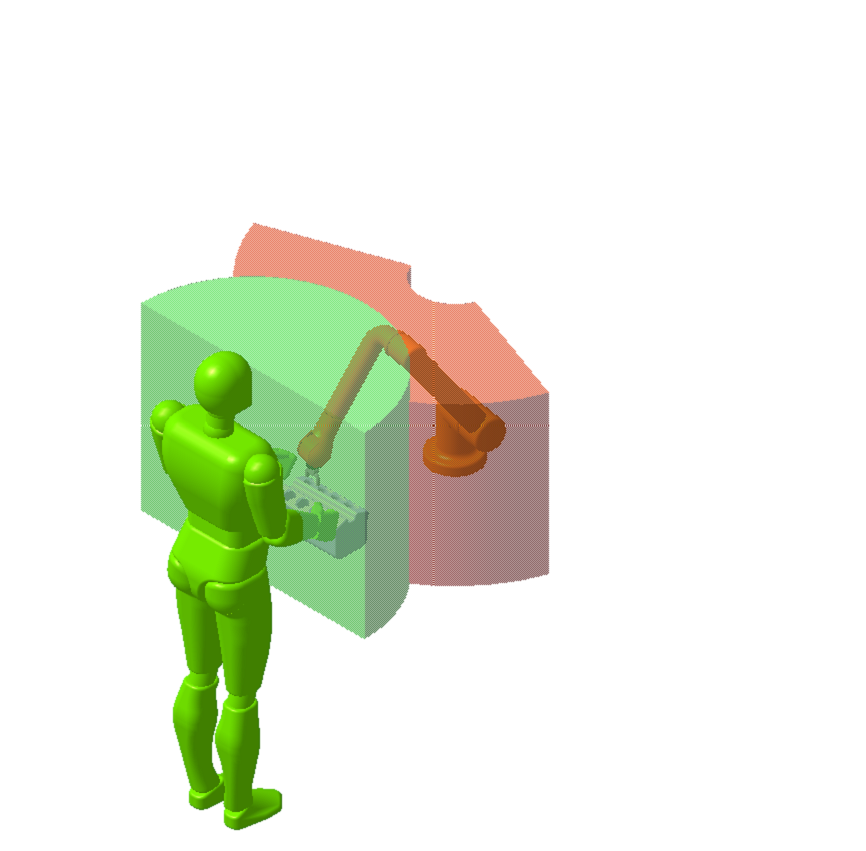
例
自動車のエンジンの組み立てで、ヒトとロボットが同時に別の部品を組み付けている、といったことが考えられます。
ロボットは、自分のタスクをこなしつつ、ヒトに危害を加えないように、かつヒトの作業の邪魔をしないように動作する必要があります。
他にも、ヒトが差し出したパーツに対して、ロボットが別のパーツを取り付ける・色を塗る・写真を撮る・合否判定をする、などといったことも考えられます。
必要とされる技術要素
- 自動軌跡生成、状況に応じたタスクの順番の入れ替え
- 人の動作の意図の理解・動作の予測
- 万一の接触の際に停止できるよう、動力と力の制限
メリット
ヒトとロボットがお互いに最高の効率で作業ができます。
人力では持てない重たいものをロボットが助けるなど、ヒトとロボットのお互いの長所を活かすことができます。
デメリット
「同時」よりもさらに高度な制御が必要となり、安全面でも考慮することが増えます。
注意点
あくまで一論文としてのまとめであり、国際規格で「このレベルだからこの技術要素が必要」、と決められているわけではありません。
まとめ
いかがだったでしょうか?
段階が進むごとに、ロボットとヒトが協力して作業をしているレベルが上がっているのが分かったと思います。
が、段階が進むごとにより高度な制御が必要となりますし、安全面で考えないといけないことも増えていきます。
この分類にもとづくと、「現段階で広く実現されているのは、1~3までで、今後技術の発展に伴い4,5の形態へと進んでいく」と言えると思います。
ですが、これはあくまで1つの分類案であり、例えば、「弱いロボット」(岡田美智男著:2016)では、あまり多機能ではないロボットにヒト側が歩み寄るというアプローチも紹介されています。
昨今普及している配膳ロボットは、ロボットの機能としては指示された場所(テーブル)に物を運ぶ・元の場所に戻る・ヒトがいたら適宜停止するなど、それほど多くの機能を持ちません。「弱いロボット」の思想に近いと感じます。")
参考資料など
International Federation of Robotics
https://www.diva-portal.org/smash/get/diva2:816519/FULLTEXT02.pdf
From Robots to Collaborative Robots - A Brief History
https://www.researchgate.net/publication/333357161_Developing_a_reference_model_for_human-robot_interaction
https://www.zetagroupengineering.com/levels-of-collaboration-robots/
協働ロボットと人の作業の関連性とは?協働・協調・共存の違いを解説 | NBK【鍋屋バイテック会社】
*1:Fraunhofer Institute for Industrial Engineering IAO; 日本語の正式名称は「フラウンホーファー労働経済・組織研究所」です。フラウンホーファー日本代表部のホームページより https://www.fraunhofer.jp/ja/institutes-establishments.html
*2:具体例は筆者の創作です
*3:日本語訳では、あえて「協働」「協調」の言葉を避けました
*4:安全機能として制限されていることを意味します。他のソフトウエアの機能(速度監視・停止監視など)も、都度記載しませんが同様です
*5:そもそもヒトは無制限に歩けるので、無限大になってしまう
*6:ロボットをどれくらい高速で動かせるかは、ヒトの作業空間とロボットの作業空間がどれくらい近いか・どれくらいの時間で停止できるか、といったことを踏まえて決定する必要があります
*7:くどいようですが必須ではありません
*8:くどいようですが必須ではありません