



今回は、機構で特色のあるロボットを紹介します。

川崎重工のMシリーズですが、平行リンクのロボットかと思いきや、第3軸に工夫があります。
通常のリンク付きロボットの場合
通常のリンク付きロボットの場合、下の図のように、第3軸を駆動するL2とL3は同じ長さです。
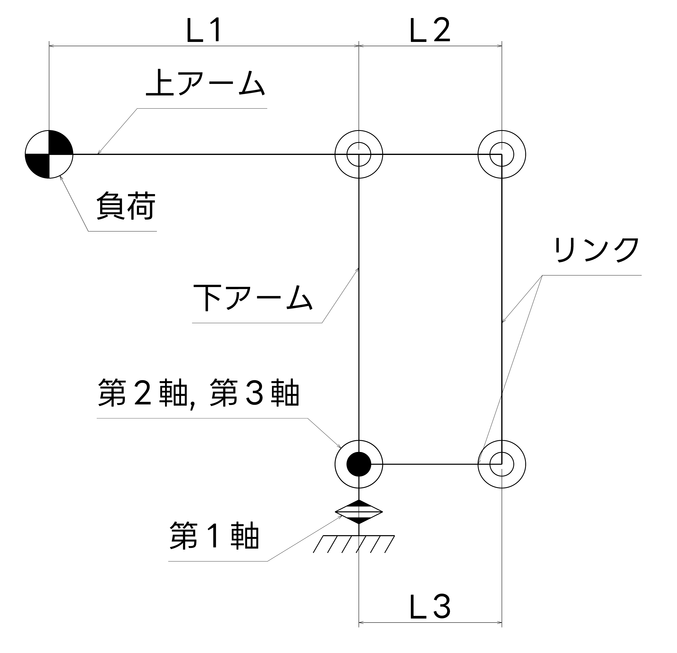
そのため、仮に
- 負荷:100kg
- L1=1m
- L2=L3=0.5m
- 重力加速度:10で近似
とすると、この姿勢で静止している場合、第3軸にかかるトルクは100kg×1m×10 = 1000Nmとなります。
(L2側で計算すると、200kg×0.5m×10=1000Nm)
川崎重工Mシリーズの場合
ですが、このMシリーズは、L2に対してL3を短く設計してあります。*1
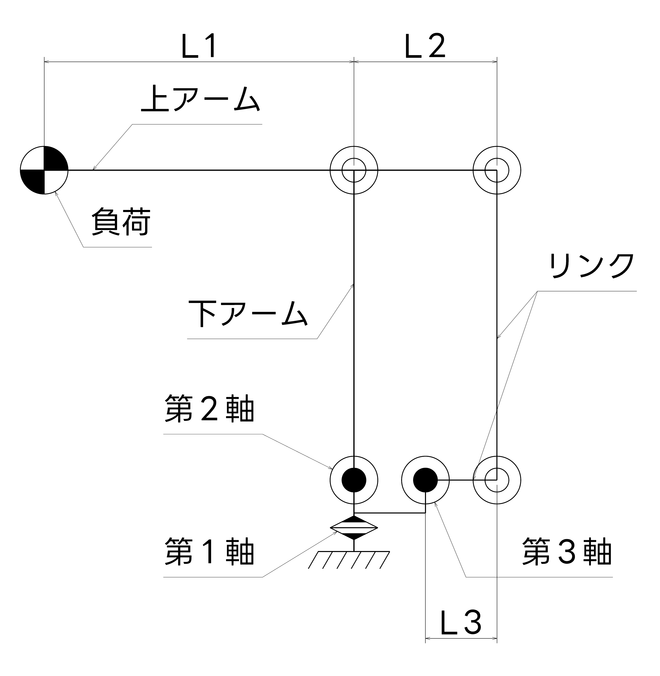
先ほどと同様、
- 負荷:100kg
- L1=1m
- L2=0.5m
- L3=0.25m
- 重力加速度:10で近似
とすると、第3軸にかかるトルクは100kg×1m×10×(0.25/0.5)= 500Nmとなります。
シンプルにてこの原理を使って第3軸の負荷を軽減しているわけですね!*2
なお、こちらの川崎重工のページで詳しい説明があります。
特許 第3614383号 ロボット | 第163号 ロボット特集号 | 川崎重工業株式会社
この機体をはじめ、川崎重工はメカ的に工夫を凝らしたロボットが多く、見ていて楽しいです。
今後も紹介していきたいと思います。