



今回は協働ロボット*1の手首構造についてです。
手首の関節について
通常の6軸多関節ロボットは、下記の図のような関節配置をしているものが多いです。
(当ブログのロボット構造の図示方法はこちらをご覧ください:本ブログでのロボット模式図について - FA・ロボット業界の片隅から)
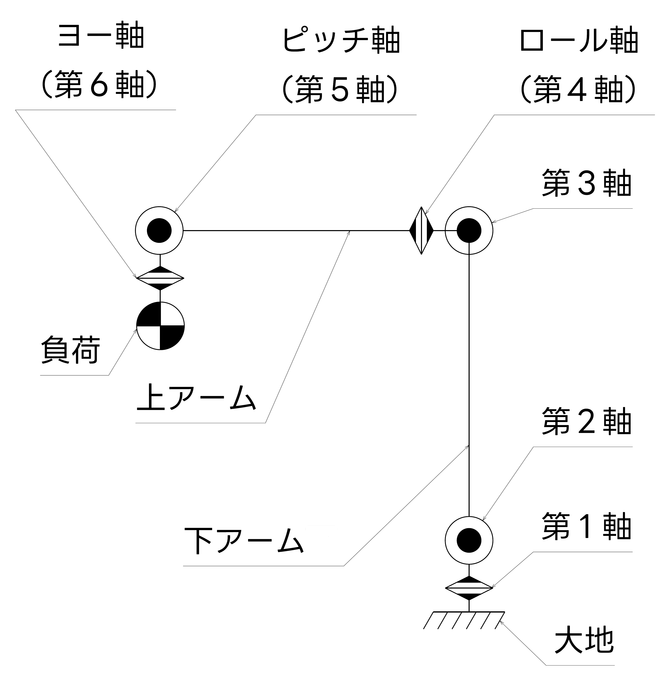
したがって、ロボットハンド(ツール)の姿勢ロール・ピッチ・ヨーに対する影響は下記のようになります。
- ロール・・第4軸の角度が支配的
- ピッチ・・第5軸の角度が支配的
- ヨー・・第6軸の角度が支配的
もちろん、上アームの角度によってどの軸がどう影響するかは変わるのですが、基本的にはということでお考え下さい。
安川電機のこの動画を見ると、第4軸が回転して上アームの向きが変わっている(YASKAWAのロゴが上を向いたり下を向いたりしている)ことが分かります。
Universal Robotの手首の関節について
ですが、Universal Robot社(以下UR)のロボットは、下記の図のような関節配置になっています。
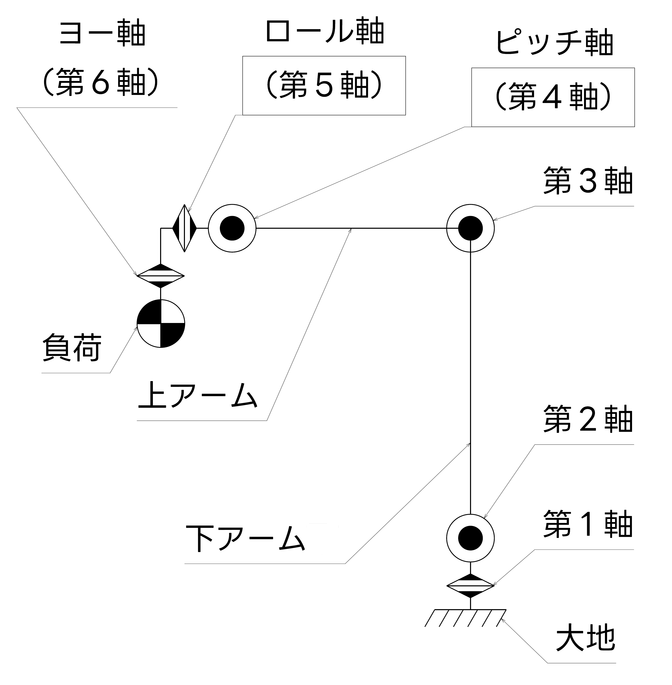
前述の構造とは第4軸と第5軸の配置が入れ替わっており、下記のような分担になります。
- ロール・・第5軸の角度が支配的
- ピッチ・・第4軸の角度が支配的
- ヨー・・第6軸の角度が支配的
URの動画を見ると、手首の姿勢を作る関節は手首周りに集中していることが分かります。
新興の協働ロボットメーカはURと同様の関節配置が多い
UR以外ではOmron(TechMan)のTMシリーズやJAKAなど、協働ロボットで同じ関節配置をしているロボットが多いです。
URライクな配置は、手首部分に重量が集中するので駆動面では不利になりますが、第4,5,6軸で設計が使いまわせるので設計負荷軽減・調達面のコストダウンになると思われます。
外見も、手首部分の部材が1個余分についているように見えるため、コンパクトさでも若干不利です。
Universal Robot社 UR5e
UR5e Lightweight, versatile cobotより引用

一方、安川のMOTOMAN-HCやFANUCのCRX、デンソーのCOBOTTA PRO、KUKAのLBR iisyなど、
従来からロボットを製造しているメーカの協働ロボットは、最初に紹介した、通常の6軸多関節ロボットの関節配置を踏襲しているものが多いです。
安川電機 MOTOMAN HC10
ハンドリング(搬送・組立・検査)ロボット - 人協働ロボット MOTOMAN-HC10DTPシリーズ - 仕様 - 産業用ロボット | 安川電機の製品・技術情報サイトより引用

使い勝手は同じ
では、ロボットを使う上で何か違うの?と言われるとほとんど何も違わないです。
この記事の意味は?と言われそうですが(笑)、手首の軸配置1つにも色が出るので、観察していて面白いと思った次第です。