



ロボットの配線・配管について紹介していきたいと思います。
(なお、制御装置内の配線や、制御装置とロボットの間の配線については除きます)
1回目はロボット内を通っている配線の分類です。
ロボットの配線は、必須の配線とオプショナルな配線に分けて考えることができます。
必須の配線
必須の配線とは、ロボットがロボットとして動作するための最低限の配線のことで、
- モータの動力線
- エンコーダの信号線
- ブレーキの制御線
の3種類さえ通っていれば、ロボットは動作します。*1
重要な配線達なのですが、ユーザ・SIerからすればあまり興味がない部分です。
エンコーダのバスがどうなっているか、モータ線が何sqか?なんて気にならないと思いますので省略します*2
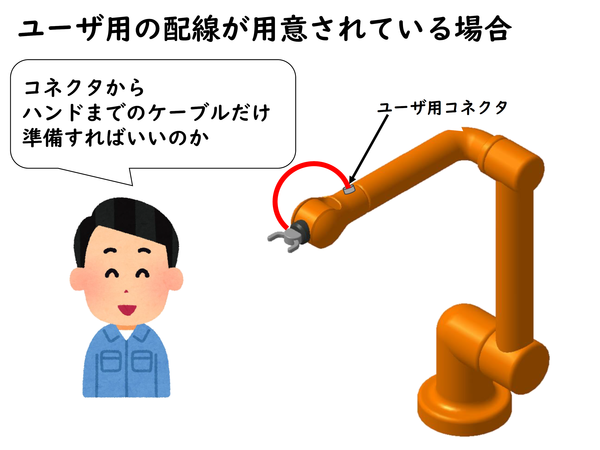
オプショナルな配線=ユーザ用の配線
ロボットは、上記の必須配線に加えて、余分なIO信号用の配線やエア配管をあらかじめ備えていて、手首付近にコネクタが出ていることが多いです。
これは、システム構築の際の利便性を考えて提供されているものです。
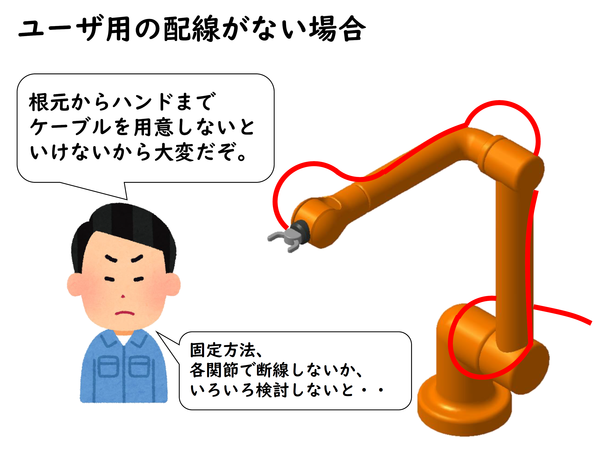
ない場合は自分でケーブルを用意して取り付けなければいけません。
ケーブルの固定方法や各関節が動いたときに断線しないか、周辺の設備にケーブルが引っ掛からないかなど検討内容が増えてしまいます。
ただ、ユーザごとにカスタムするわけではない*3ので、どうしても最大公約数的な内容になってしまい、ある人にとっては余ったり、別の人にとっては足りなかったりします。
余っている人にとっては、余計なコストを負担しているわけですが*4、あまりに少なくすると不便であり、難しいところです。
どれくらい余分な配線を用意するかは、メーカの考え方が透けて見えてきます。
- 「ちょっとは用意するけど、もっと必要だったら自分で取り付けてね」というメーカー
- 「とにかくたくさん用意しておくから!これで足りるはず!」というメーカー
などなど・・・
また、ロボットの用途ごとにも特徴が出やすいです。
- ハンドリング用ロボットであれば、エア配管とIO線をバランスよく
- スポット溶接用のロボットであれば、冷却水を通すホースが用意されていたり
- LANケーブルを内蔵して視覚装置などへの対応を強調したり
といった具合です。
各社のカタログを見比べて、各メーカーがどのような思想でロボットを設計しているかをあれこれ推測するのも楽しいですね。*5
注意点
ただ、配線・配管が用意されているから、何にも考えなくていいや!というのは危険です。
- ケーブルの許容電流
- エア配管の直径、許容圧力
などはカタログにも載っている基本情報ですが、それに加え
- 内部のケーブルがシールド付きかどうか・ツイストペアかどうか
も確認した方がいいでしょう。エンコーダ信号やアナログ信号を通したい場合、裸線ではノイズで使い物にならないかもしれません。
エア配管も太さだけではなく、
- 内部配管の長さの情報
も引き出しておいた方が無難です。ロボットの外観から予想される以上に内部の経路が長く、圧損が大きい場合があります。
自分がゼロから選定した場合、どのような配線・配管になるか考えたうえで、メーカが提供している配線・配管と比較してみるのもいいかもしれません。
まとめ
いかがだったでしょうか。
まずはさらっとロボット内にどのような配線・配管がされているかを見てみました。
配線についてはシリーズ化して、もう少し詳しく掘り下げていきますのでお楽しみに!